|
Chaste
Release::3.4
|
|
Chaste
Release::3.4
|
#include <StokesFlowPreconditionerAssembler.hpp>
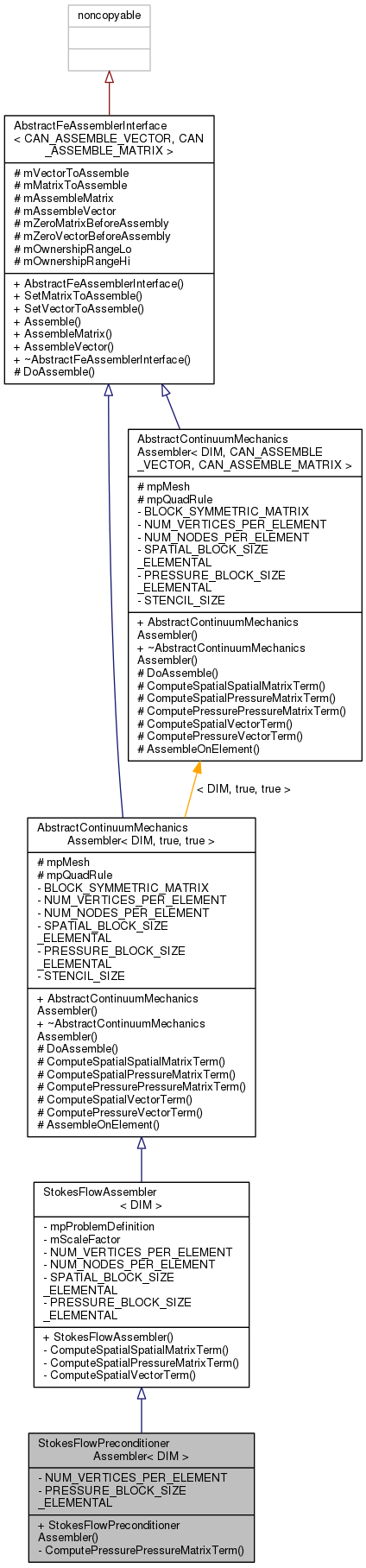
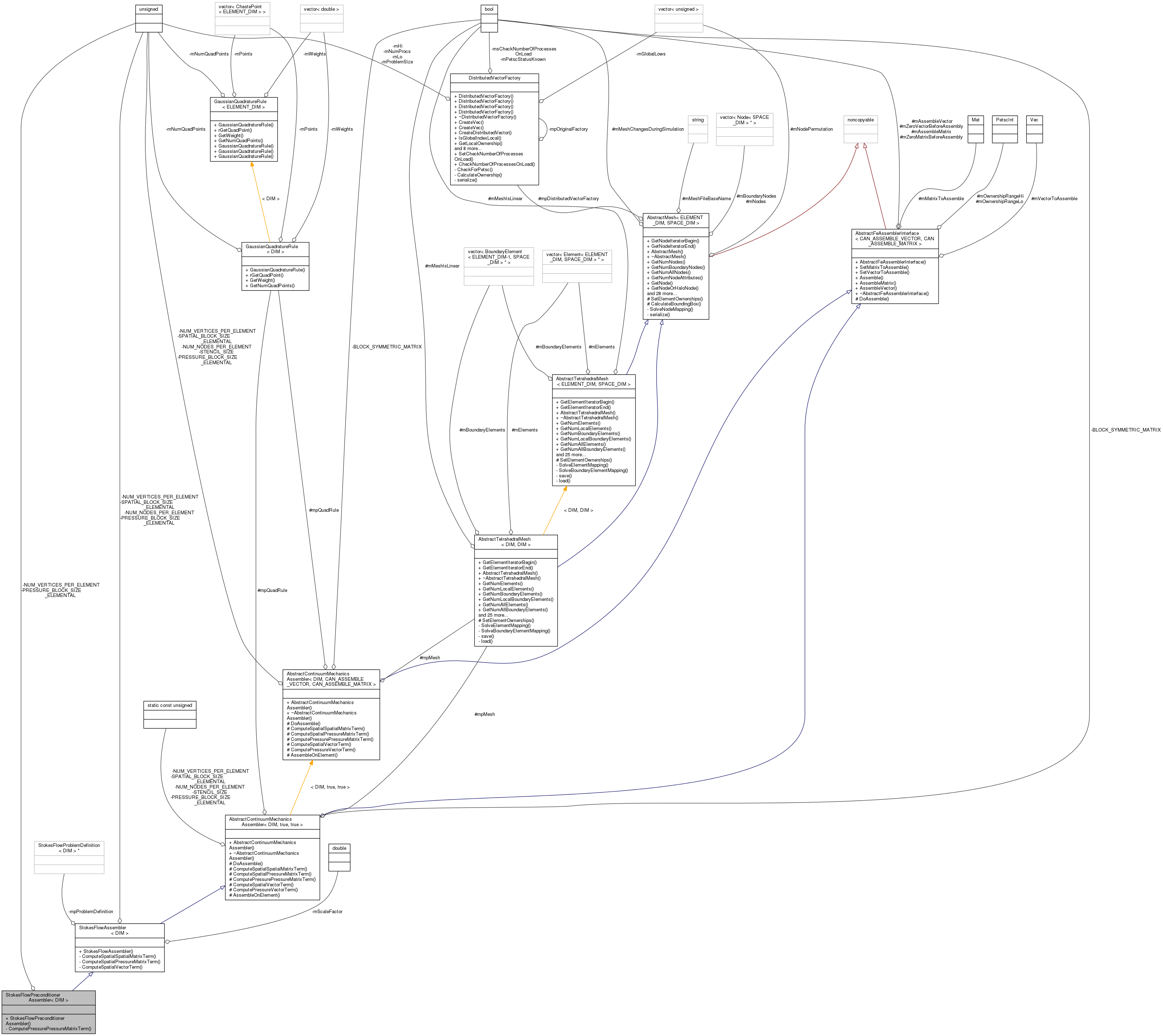
 Inheritance diagram for StokesFlowPreconditionerAssembler< DIM >: Collaboration diagram for StokesFlowPreconditionerAssembler< DIM >:
Inheritance diagram for StokesFlowPreconditionerAssembler< DIM >: Collaboration diagram for StokesFlowPreconditionerAssembler< DIM >:Public Member Functions | |
| StokesFlowPreconditionerAssembler (AbstractTetrahedralMesh< DIM, DIM > *pMesh, StokesFlowProblemDefinition< DIM > *pProblemDefinition) | |
| Public Member Functions inherited from StokesFlowAssembler< DIM > | |
| StokesFlowAssembler (AbstractTetrahedralMesh< DIM, DIM > *pMesh, StokesFlowProblemDefinition< DIM > *pProblemDefinition) | |
| Public Member Functions inherited from AbstractContinuumMechanicsAssembler< DIM, true, true > | |
| AbstractContinuumMechanicsAssembler (AbstractTetrahedralMesh< DIM, DIM > *pMesh) | |
| virtual | ~AbstractContinuumMechanicsAssembler () |
| Public Member Functions inherited from AbstractFeAssemblerInterface< CAN_ASSEMBLE_VECTOR, CAN_ASSEMBLE_MATRIX > | |
| AbstractFeAssemblerInterface () | |
| void | SetMatrixToAssemble (Mat &rMatToAssemble, bool zeroMatrixBeforeAssembly=true) |
| void | SetVectorToAssemble (Vec &rVecToAssemble, bool zeroVectorBeforeAssembly) |
| void | Assemble () |
| void | AssembleMatrix () |
| void | AssembleVector () |
| virtual | ~AbstractFeAssemblerInterface () |
Private Member Functions | |
| c_matrix< double, PRESSURE_BLOCK_SIZE_ELEMENTAL, PRESSURE_BLOCK_SIZE_ELEMENTAL > | ComputePressurePressureMatrixTerm (c_vector< double, NUM_VERTICES_PER_ELEMENT > &rLinearPhi, c_matrix< double, DIM, NUM_VERTICES_PER_ELEMENT > &rGradLinearPhi, c_vector< double, DIM > &rX, Element< DIM, DIM > *pElement) |
Static Private Attributes | |
| static const unsigned | NUM_VERTICES_PER_ELEMENT = DIM+1 |
| static const unsigned | PRESSURE_BLOCK_SIZE_ELEMENTAL = NUM_VERTICES_PER_ELEMENT |
Assembler for setting up (volume-integral parts of) the preconditioner matrix used in the FEM solver Stokes' Flow.
The system matrix has the block form (except see comment below) [A B] [B^T 0] In contrast, the preconditioner is: [A B] [B^T M]
The class therefore just needs to inherit from StokesFlowAssembler, which will assemble the A,B,B^T terms, and it just has to overload the pressure-pressure block method.
NOTE: The elemental matrix and vector is as above. The full matrix and vector uses a completely different ordering: for parallelisation reasons the pressure variables are interleaved with the spatial variables and dummy pressure variables are used for internal nodes. For example, in 2d, the ordering is [U1 V1 P1 , .. , Un Vn, Pn] where n is the total number of nodes.
Definition at line 65 of file StokesFlowPreconditionerAssembler.hpp.
|
inline |
Constructor
| pMesh | mesh |
| pProblemDefinition | problem definition |
Definition at line 106 of file StokesFlowPreconditionerAssembler.hpp.
|
inlineprivatevirtual |
For a continuum mechanics problem in mixed form (displacement-pressure or velocity-pressure), the matrix has the form (except see comments about ordering above) [A B1] [B2^T C ] The function is related to the pressure-pressure block, i.e. C
| rLinearPhi | All the linear basis functions on this element, evaluated at the current quad point |
| rGradLinearPhi | Gradients of all the linear basis functions on this element, evaluated at the current quad point |
| rX | Current location (physical position) |
| pElement | Current element |
Reimplemented from AbstractContinuumMechanicsAssembler< DIM, true, true >.
Definition at line 91 of file StokesFlowPreconditionerAssembler.hpp.
|
staticprivate |
Number of vertices per element
Definition at line 69 of file StokesFlowPreconditionerAssembler.hpp.
|
staticprivate |
Size of the pressure block, per element, equal num_vertices times 1 (as p solved for at each vertex.
Definition at line 75 of file StokesFlowPreconditionerAssembler.hpp.
 1.8.6
1.8.6