#include <ContinuumMechanicsProblemDefinition.hpp>
 Inheritance diagram for ContinuumMechanicsProblemDefinition< DIM >:
Inheritance diagram for ContinuumMechanicsProblemDefinition< DIM >: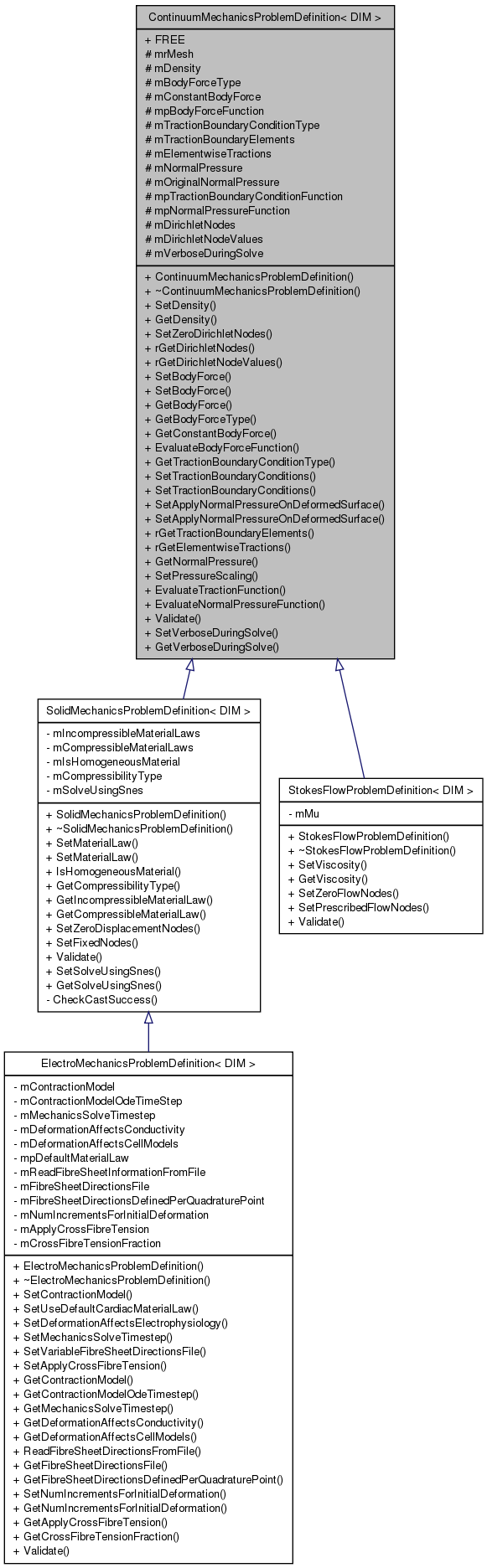 Collaboration diagram for ContinuumMechanicsProblemDefinition< DIM >:
Collaboration diagram for ContinuumMechanicsProblemDefinition< DIM >: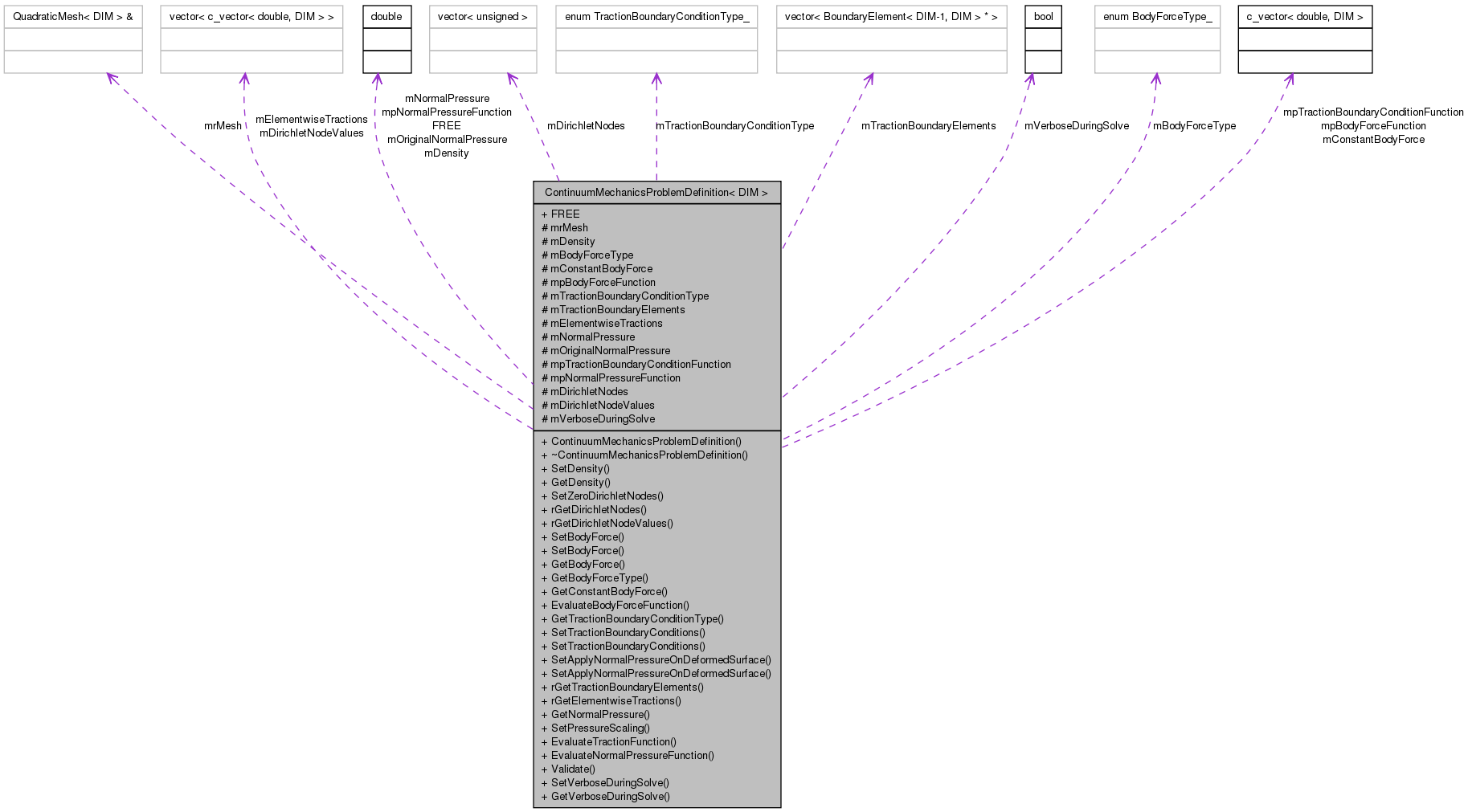
Public Member Functions | |
| ContinuumMechanicsProblemDefinition (QuadraticMesh< DIM > &rMesh) | |
| virtual | ~ContinuumMechanicsProblemDefinition () |
| void | SetDensity (double density) |
| double | GetDensity () |
| void | SetZeroDirichletNodes (std::vector< unsigned > &rZeroDirichletNodes) |
| std::vector< unsigned > & | rGetDirichletNodes () |
| std::vector< c_vector< double, DIM > > & | rGetDirichletNodeValues () |
| void | SetBodyForce (c_vector< double, DIM > bodyForce) |
| void | SetBodyForce (c_vector< double, DIM >(*pFunction)(c_vector< double, DIM > &rX, double t)) |
| c_vector< double, DIM > | GetBodyForce (c_vector< double, DIM > &rX, double t=0.0) |
| BodyForceType | GetBodyForceType () |
| c_vector< double, DIM > | GetConstantBodyForce () |
| c_vector< double, DIM > | EvaluateBodyForceFunction (c_vector< double, DIM > &rX, double t) |
| TractionBoundaryConditionType | GetTractionBoundaryConditionType () |
| void | SetTractionBoundaryConditions (std::vector< BoundaryElement< DIM-1, DIM > * > &rTractionBoundaryElements, std::vector< c_vector< double, DIM > > &rElementwiseTractions) |
| void | SetTractionBoundaryConditions (std::vector< BoundaryElement< DIM-1, DIM > * > &rTractionBoundaryElements, c_vector< double, DIM >(*pFunction)(c_vector< double, DIM > &rX, double t)) |
| void | SetApplyNormalPressureOnDeformedSurface (std::vector< BoundaryElement< DIM-1, DIM > * > &rTractionBoundaryElements, double normalPressure) |
| void | SetApplyNormalPressureOnDeformedSurface (std::vector< BoundaryElement< DIM-1, DIM > * > &rTractionBoundaryElements, double(*pFunction)(double t)) |
| std::vector< BoundaryElement < DIM-1, DIM > * > & | rGetTractionBoundaryElements () |
| std::vector< c_vector< double, DIM > > & | rGetElementwiseTractions () |
| double | GetNormalPressure () |
| void | SetPressureScaling (double scaleFactor) |
| c_vector< double, DIM > | EvaluateTractionFunction (c_vector< double, DIM > &rX, double t) |
| double | EvaluateNormalPressureFunction (double t) |
| virtual void | Validate () |
| void | SetVerboseDuringSolve (bool verboseDuringSolve=true) |
| bool | GetVerboseDuringSolve () |
Static Public Attributes | |
| static const double | FREE = std::numeric_limits<double>::max() |
Protected Attributes | |
| QuadraticMesh< DIM > & | mrMesh |
| double | mDensity |
| BodyForceType | mBodyForceType |
| c_vector< double, DIM > | mConstantBodyForce |
| c_vector< double, DIM >(* | mpBodyForceFunction )(c_vector< double, DIM > &rX, double t) |
| TractionBoundaryConditionType | mTractionBoundaryConditionType |
| std::vector< BoundaryElement < DIM-1, DIM > * > | mTractionBoundaryElements |
| std::vector< c_vector< double, DIM > > | mElementwiseTractions |
| double | mNormalPressure |
| double | mOriginalNormalPressure |
| c_vector< double, DIM >(* | mpTractionBoundaryConditionFunction )(c_vector< double, DIM > &rX, double t) |
| double(* | mpNormalPressureFunction )(double t) |
| std::vector< unsigned > | mDirichletNodes |
| std::vector< c_vector< double, DIM > > | mDirichletNodeValues |
| bool | mVerboseDuringSolve |
Detailed Description
template<unsigned DIM>
class ContinuumMechanicsProblemDefinition< DIM >
A class for specifying various parts of a continuum mechanics problem, Dirichlet node information (which nodes are in space in a solid problem, which nodes have fixed flow in a fluids problem), the body force (per unit mass) (usually acceleration due to gravity or zero), the traction boundary conditions, and the density.
Definition at line 74 of file ContinuumMechanicsProblemDefinition.hpp.
Constructor & Destructor Documentation
| ContinuumMechanicsProblemDefinition< DIM >::ContinuumMechanicsProblemDefinition | ( | QuadraticMesh< DIM > & | rMesh | ) |
Constructor initialises the body force to zero and density to 1.0
- Parameters:
-
rMesh is the mesh being solved on
Definition at line 47 of file ContinuumMechanicsProblemDefinition.cpp.
| virtual ContinuumMechanicsProblemDefinition< DIM >::~ContinuumMechanicsProblemDefinition | ( | ) | [inline, virtual] |
Destructor
Definition at line 153 of file ContinuumMechanicsProblemDefinition.hpp.
Member Function Documentation
| c_vector< double, DIM > ContinuumMechanicsProblemDefinition< DIM >::EvaluateBodyForceFunction | ( | c_vector< double, DIM > & | rX, |
| double | t | ||
| ) |
Evaluate the body force function (error if GetBodyForceType()!=FUNCTIONAL_BODY_FORCE)
- Parameters:
-
rX spatial location t current time
Definition at line 99 of file ContinuumMechanicsProblemDefinition.cpp.
| double ContinuumMechanicsProblemDefinition< DIM >::EvaluateNormalPressureFunction | ( | double | t | ) |
Evaluate the pressure boundary condition function (error if GetTractionBoundaryConditionType()!=FUNCTIONAL_PRESSURE_ON_DEFORMED)
- Parameters:
-
t current time
Definition at line 233 of file ContinuumMechanicsProblemDefinition.cpp.
| c_vector< double, DIM > ContinuumMechanicsProblemDefinition< DIM >::EvaluateTractionFunction | ( | c_vector< double, DIM > & | rX, |
| double | t | ||
| ) |
Evaluate the traction boundary condition function (error if GetTractionBoundaryConditionType()!=FUNCTIONAL_TRACTION)
- Parameters:
-
rX spatial location t current time
Definition at line 226 of file ContinuumMechanicsProblemDefinition.cpp.
| c_vector< double, DIM > ContinuumMechanicsProblemDefinition< DIM >::GetBodyForce | ( | c_vector< double, DIM > & | rX, |
| double | t = 0.0 |
||
| ) |
Get the body force at a particular point and time. Note: The user can either call this, or check what type of body force has been set using GetBodyForceType() and then call GetConstantBodyForce() or EvaluateBodyForceFunction(X,t).
- Parameters:
-
rX spatial location t current time
Definition at line 106 of file ContinuumMechanicsProblemDefinition.cpp.
References NEVER_REACHED.
| BodyForceType ContinuumMechanicsProblemDefinition< DIM >::GetBodyForceType | ( | ) |
Get the body force type
Definition at line 86 of file ContinuumMechanicsProblemDefinition.cpp.
| c_vector< double, DIM > ContinuumMechanicsProblemDefinition< DIM >::GetConstantBodyForce | ( | ) |
Get the constant body force (error if GetBodyForceType()!=CONSTANT_BODY_FORCE)
Definition at line 92 of file ContinuumMechanicsProblemDefinition.cpp.
| double ContinuumMechanicsProblemDefinition< DIM >::GetDensity | ( | ) |
Get the density
Definition at line 65 of file ContinuumMechanicsProblemDefinition.cpp.
| double ContinuumMechanicsProblemDefinition< DIM >::GetNormalPressure | ( | ) |
Get the pressure for the boundary elements (corresponding to vector returned by rGetTractionBoundaryElements()) (error if GetTractionBoundaryConditionType()!=PRESSURE_ON_DEFORMED)
Definition at line 219 of file ContinuumMechanicsProblemDefinition.cpp.
| TractionBoundaryConditionType ContinuumMechanicsProblemDefinition< DIM >::GetTractionBoundaryConditionType | ( | ) |
Get the traction (Neumann) boundary condition type
Definition at line 125 of file ContinuumMechanicsProblemDefinition.cpp.
| bool ContinuumMechanicsProblemDefinition< DIM >::GetVerboseDuringSolve | ( | ) | [inline] |
Get whether the solver should be verbose or not
Definition at line 342 of file ContinuumMechanicsProblemDefinition.hpp.
References ContinuumMechanicsProblemDefinition< DIM >::mVerboseDuringSolve.
| std::vector< unsigned > & ContinuumMechanicsProblemDefinition< DIM >::rGetDirichletNodes | ( | ) |
Get the Dirichlet nodes
Definition at line 192 of file ContinuumMechanicsProblemDefinition.cpp.
| std::vector< c_vector< double, DIM > > & ContinuumMechanicsProblemDefinition< DIM >::rGetDirichletNodeValues | ( | ) |
Get the Dirichlet node values.
Definition at line 198 of file ContinuumMechanicsProblemDefinition.cpp.
| std::vector< c_vector< double, DIM > > & ContinuumMechanicsProblemDefinition< DIM >::rGetElementwiseTractions | ( | ) |
Get the element-wise tractions vector (corresponding to vector returned by rGetTractionBoundaryElements()) (error if GetTractionBoundaryConditionType()!=ELEMENTWISE_TRACTION)
Definition at line 211 of file ContinuumMechanicsProblemDefinition.cpp.
| std::vector< BoundaryElement< DIM-1, DIM > * > & ContinuumMechanicsProblemDefinition< DIM >::rGetTractionBoundaryElements | ( | ) |
Get the vector of traction boundary elements
Definition at line 204 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetApplyNormalPressureOnDeformedSurface | ( | std::vector< BoundaryElement< DIM-1, DIM > * > & | rTractionBoundaryElements, |
| double(*)(double t) | pFunction | ||
| ) |
Set traction (Neumann) boundary conditions. This version says that pressures should be applied on surfaces in the DEFORMED body in the outward normal direction, and here the pressure is specified in FUNCTIONAL FORM
- Parameters:
-
rTractionBoundaryElements The boundary elements pFunction the pressure function (a function of time, returning a double)
Definition at line 163 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetApplyNormalPressureOnDeformedSurface | ( | std::vector< BoundaryElement< DIM-1, DIM > * > & | rTractionBoundaryElements, |
| double | normalPressure | ||
| ) |
Set traction (Neumann) boundary conditions. This version says that pressures should be applied on surfaces in the DEFORMED body in the outward normal direction.
- Parameters:
-
rTractionBoundaryElements The boundary elements normalPressure the corresponding pressure
Definition at line 152 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetBodyForce | ( | c_vector< double, DIM >(*)(c_vector< double, DIM > &rX, double t) | pFunction | ) |
Set the body force to be used - this version sets a functional body force
- Parameters:
-
pFunction a function of space and time returning a vector
Definition at line 78 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetBodyForce | ( | c_vector< double, DIM > | bodyForce | ) |
Set the body force to be used - this version sets a constant body force
- Parameters:
-
bodyForce the constant body force
Definition at line 71 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetDensity | ( | double | density | ) |
Set the density
- Parameters:
-
density
Definition at line 58 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetPressureScaling | ( | double | scaleFactor | ) |
Set the value that will be returned by GetNormalPressure() to be a fraction of its full value.
Note: you don't have to take into account previous calls when calling this. SetPressureScaling(0.1); SetPressureScaling(1); will lead to the original pressure being used
(Error if GetTractionBoundaryConditionType()!=PRESSURE_ON_DEFORMED)
- Parameters:
-
scaleFactor scale factor
Definition at line 240 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetTractionBoundaryConditions | ( | std::vector< BoundaryElement< DIM-1, DIM > * > & | rTractionBoundaryElements, |
| std::vector< c_vector< double, DIM > > & | rElementwiseTractions | ||
| ) |
Set traction (Neumann) boundary conditions. This version takes in a vector of boundary elements, and corresponding tractions for each one.
- Parameters:
-
rTractionBoundaryElements the boundary elements rElementwiseTractions corresponding tractions
Definition at line 131 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetTractionBoundaryConditions | ( | std::vector< BoundaryElement< DIM-1, DIM > * > & | rTractionBoundaryElements, |
| c_vector< double, DIM >(*)(c_vector< double, DIM > &rX, double t) | pFunction | ||
| ) |
Set traction (Neumann) boundary conditions. This version takes in a vector of boundary elements, and a function to be evaluated at points in these boundary elements
- Parameters:
-
rTractionBoundaryElements the boundary elements pFunction the traction function (a function of space and time, returning a vector)
Definition at line 142 of file ContinuumMechanicsProblemDefinition.cpp.
| void ContinuumMechanicsProblemDefinition< DIM >::SetVerboseDuringSolve | ( | bool | verboseDuringSolve = true | ) | [inline] |
Tell the solver to be verbose (print details on how the solve is progressing), or not.
- Parameters:
-
verboseDuringSolve be verbose or not.
Definition at line 334 of file ContinuumMechanicsProblemDefinition.hpp.
References ContinuumMechanicsProblemDefinition< DIM >::mVerboseDuringSolve.
| void ContinuumMechanicsProblemDefinition< DIM >::SetZeroDirichletNodes | ( | std::vector< unsigned > & | rZeroDirichletNodes | ) |
Set a list of nodes (indices) to be given zero Dirichlet boundary condition
- Parameters:
-
rZeroDirichletNodes the nodes at which the value (displacement/flow) is zero
Definition at line 175 of file ContinuumMechanicsProblemDefinition.cpp.
Referenced by SolidMechanicsProblemDefinition< DIM >::SetZeroDisplacementNodes(), and StokesFlowProblemDefinition< DIM >::SetZeroFlowNodes().
| void ContinuumMechanicsProblemDefinition< DIM >::Validate | ( | ) | [virtual] |
Check all variables are set appropriately. Exceptions are thrown if any are not. Derived classes can override but should call this version as well.
Reimplemented in ElectroMechanicsProblemDefinition< DIM >, SolidMechanicsProblemDefinition< DIM >, and StokesFlowProblemDefinition< DIM >.
Definition at line 247 of file ContinuumMechanicsProblemDefinition.cpp.
References EXCEPTION.
Referenced by SolidMechanicsProblemDefinition< DIM >::Validate().
Member Data Documentation
const double ContinuumMechanicsProblemDefinition< DIM >::FREE = std::numeric_limits<double>::max() [static] |
Special value for Dirichlet nodes, indicating that a Dirichlet boundary condition in a particular dimension is not specified
Definition at line 79 of file ContinuumMechanicsProblemDefinition.hpp.
BodyForceType ContinuumMechanicsProblemDefinition< DIM >::mBodyForceType [protected] |
The body force type
Definition at line 93 of file ContinuumMechanicsProblemDefinition.hpp.
c_vector<double,DIM> ContinuumMechanicsProblemDefinition< DIM >::mConstantBodyForce [protected] |
The constant body force, only used if mBodyForceType is set appropriately
Definition at line 96 of file ContinuumMechanicsProblemDefinition.hpp.
double ContinuumMechanicsProblemDefinition< DIM >::mDensity [protected] |
Density of the body (constant throughout body)
Definition at line 86 of file ContinuumMechanicsProblemDefinition.hpp.
std::vector<unsigned> ContinuumMechanicsProblemDefinition< DIM >::mDirichletNodes [protected] |
All nodes (including non-vertices) which have a dirichlet boundary condition (ie position prescribed in solid mechanics problems, flow prescribed in fluids problems).
Definition at line 137 of file ContinuumMechanicsProblemDefinition.hpp.
Referenced by StokesFlowProblemDefinition< DIM >::SetPrescribedFlowNodes().
std::vector<c_vector<double,DIM> > ContinuumMechanicsProblemDefinition< DIM >::mDirichletNodeValues [protected] |
The values at the nodes with Dirichlet boundary conditions (displacement
Definition at line 140 of file ContinuumMechanicsProblemDefinition.hpp.
Referenced by StokesFlowProblemDefinition< DIM >::SetPrescribedFlowNodes().
std::vector<c_vector<double,DIM> > ContinuumMechanicsProblemDefinition< DIM >::mElementwiseTractions [protected] |
The tractions on each surface element (only used if mTractionBoundaryConditionType is set appropriately)
Definition at line 112 of file ContinuumMechanicsProblemDefinition.hpp.
double ContinuumMechanicsProblemDefinition< DIM >::mNormalPressure [protected] |
If the tractions are specified to correspond to a pressure acting on the surface: the pressure for the given boundary elements (only used if mTractionBoundaryConditionType is set appropriately)
Definition at line 116 of file ContinuumMechanicsProblemDefinition.hpp.
double ContinuumMechanicsProblemDefinition< DIM >::mOriginalNormalPressure [protected] |
If the user asks this class to increment the pressure, the variable mNormalPressure will be altered depending on which increment it is. Here we store the original (full) pressure.
Definition at line 121 of file ContinuumMechanicsProblemDefinition.hpp.
c_vector<double,DIM>(* ContinuumMechanicsProblemDefinition< DIM >::mpBodyForceFunction)(c_vector< double, DIM > &rX, double t) [protected] |
The body force as a function of space and time, only used if mBodyForceType is set appropriately
Definition at line 99 of file ContinuumMechanicsProblemDefinition.hpp.
double(* ContinuumMechanicsProblemDefinition< DIM >::mpNormalPressureFunction)(double t) [protected] |
The normal pressure as a function if time (only used if mTractionBoundaryConditionType is set appropriately)
Definition at line 127 of file ContinuumMechanicsProblemDefinition.hpp.
c_vector<double,DIM>(* ContinuumMechanicsProblemDefinition< DIM >::mpTractionBoundaryConditionFunction)(c_vector< double, DIM > &rX, double t) [protected] |
The tractions as a function of space and time (only used if mTractionBoundaryConditionType is set appropriately)
Definition at line 124 of file ContinuumMechanicsProblemDefinition.hpp.
QuadraticMesh<DIM>& ContinuumMechanicsProblemDefinition< DIM >::mrMesh [protected] |
The mesh being solved on
Definition at line 83 of file ContinuumMechanicsProblemDefinition.hpp.
TractionBoundaryConditionType ContinuumMechanicsProblemDefinition< DIM >::mTractionBoundaryConditionType [protected] |
The traction (Neumann) boundary condition type
Definition at line 106 of file ContinuumMechanicsProblemDefinition.hpp.
std::vector<BoundaryElement<DIM-1,DIM>*> ContinuumMechanicsProblemDefinition< DIM >::mTractionBoundaryElements [protected] |
The surface elements on which tractions are applied
Definition at line 109 of file ContinuumMechanicsProblemDefinition.hpp.
bool ContinuumMechanicsProblemDefinition< DIM >::mVerboseDuringSolve [protected] |
Whether the solver will be verbose or not. See dox for Set method below
Definition at line 143 of file ContinuumMechanicsProblemDefinition.hpp.
Referenced by ContinuumMechanicsProblemDefinition< DIM >::GetVerboseDuringSolve(), and ContinuumMechanicsProblemDefinition< DIM >::SetVerboseDuringSolve().
The documentation for this class was generated from the following files:
- continuum_mechanics/src/problem/ContinuumMechanicsProblemDefinition.hpp
- continuum_mechanics/src/problem/ContinuumMechanicsProblemDefinition.cpp
