#include <StokesFlowPreconditionerAssembler.hpp>
 Inheritance diagram for StokesFlowPreconditionerAssembler< DIM >:
Inheritance diagram for StokesFlowPreconditionerAssembler< DIM >: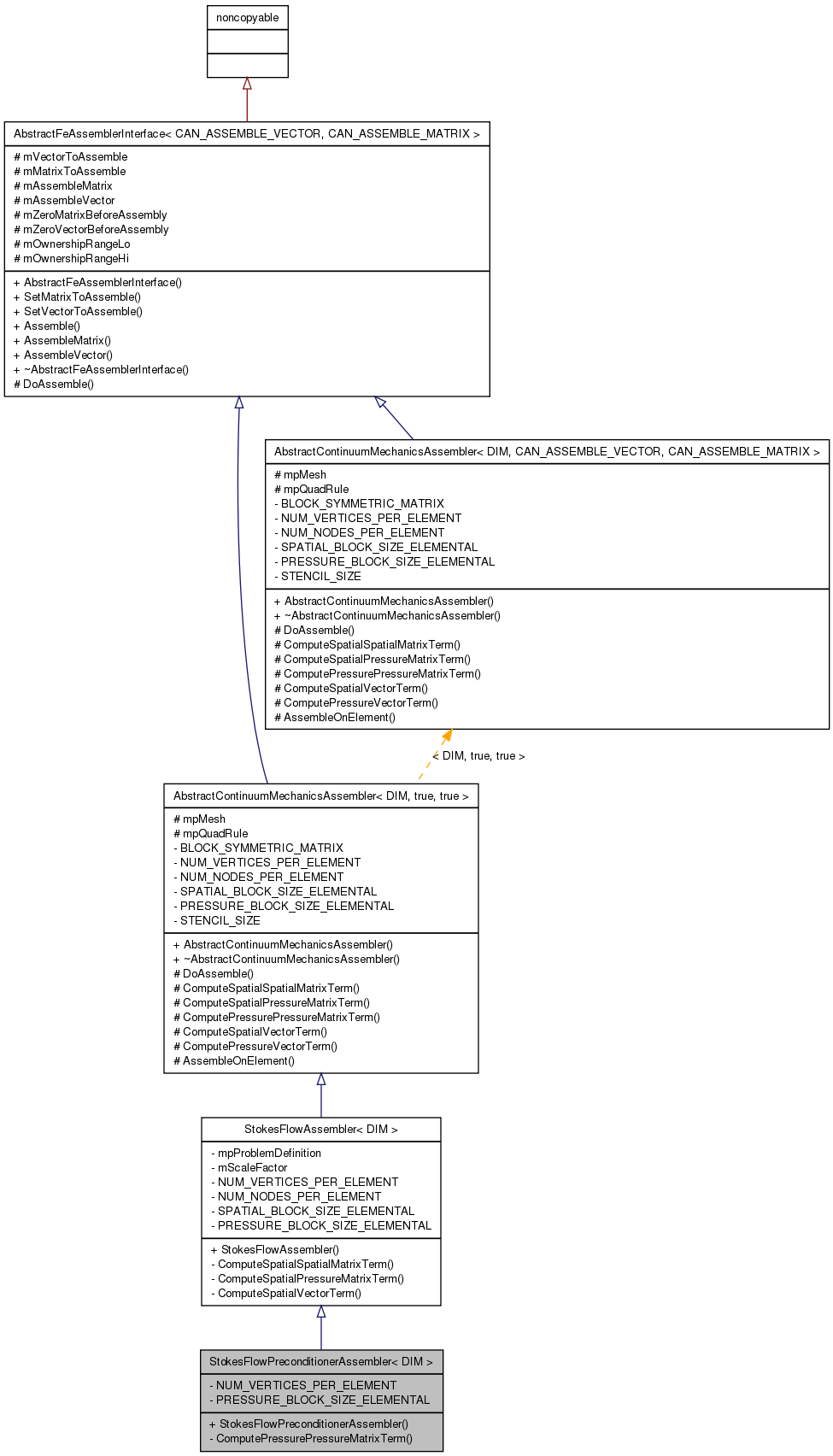 Collaboration diagram for StokesFlowPreconditionerAssembler< DIM >:
Collaboration diagram for StokesFlowPreconditionerAssembler< DIM >: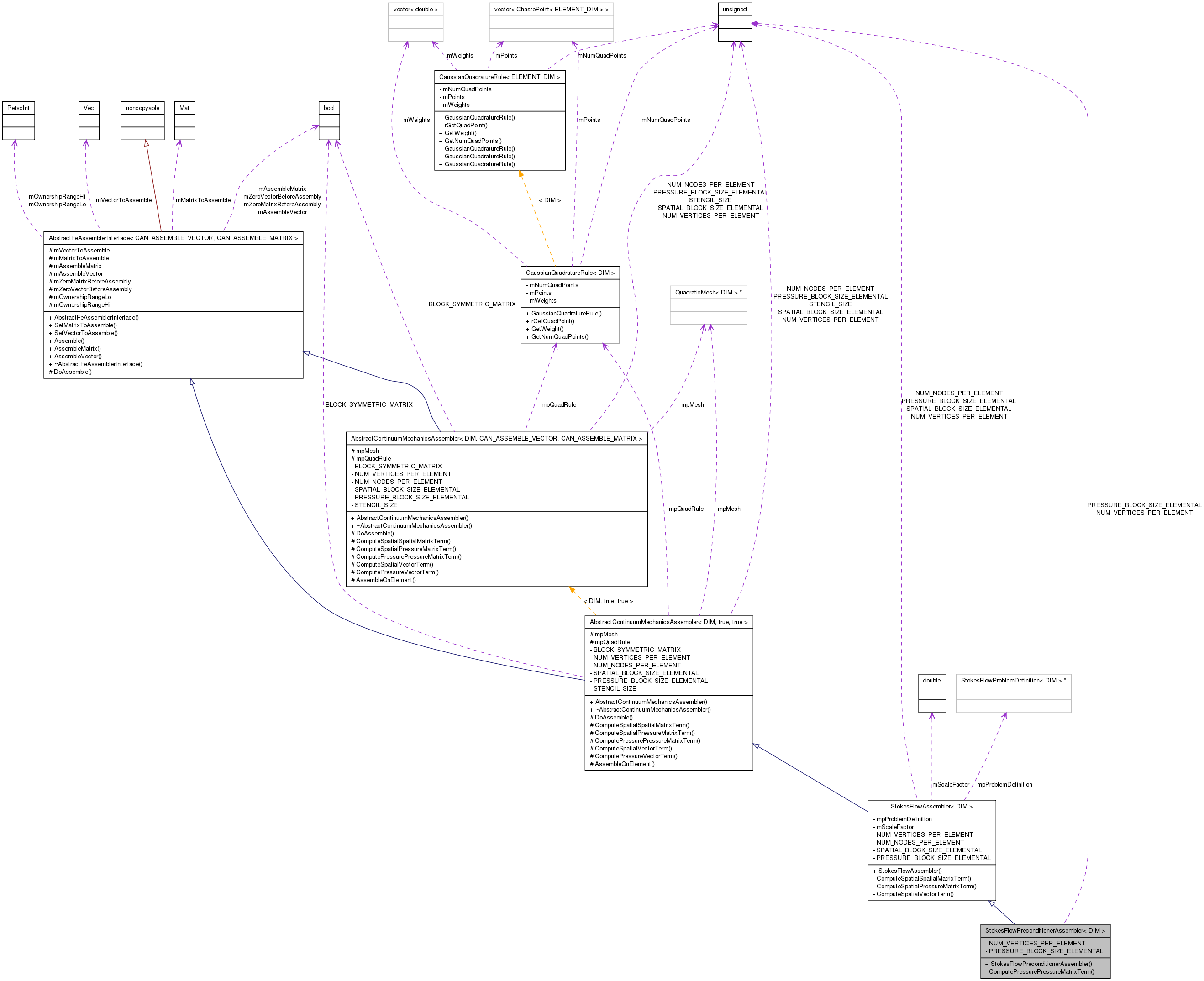
Public Member Functions | |
| StokesFlowPreconditionerAssembler (QuadraticMesh< DIM > *pMesh, StokesFlowProblemDefinition< DIM > *pProblemDefinition) | |
Private Member Functions | |
| c_matrix< double, PRESSURE_BLOCK_SIZE_ELEMENTAL, PRESSURE_BLOCK_SIZE_ELEMENTAL > | ComputePressurePressureMatrixTerm (c_vector< double, NUM_VERTICES_PER_ELEMENT > &rLinearPhi, c_matrix< double, DIM, NUM_VERTICES_PER_ELEMENT > &rGradLinearPhi, c_vector< double, DIM > &rX, Element< DIM, DIM > *pElement) |
Static Private Attributes | |
| static const unsigned | NUM_VERTICES_PER_ELEMENT = DIM+1 |
| static const unsigned | PRESSURE_BLOCK_SIZE_ELEMENTAL = NUM_VERTICES_PER_ELEMENT |
Detailed Description
template<unsigned DIM>
class StokesFlowPreconditionerAssembler< DIM >
Assembler for setting up (volume-integral parts of) the preconditioner matrix used in the FEM solver Stokes' Flow.
The system matrix has the block form (except see comment below) [A B] [B^T 0] In contrast, the preconditioner is: [A B] [B^T M]
The class therefore just needs to inherit from StokesFlowAssembler, which will assemble the A,B,B^T terms, and it just has to overload the pressure-pressure block method.
NOTE: The elemental matrix and vector is as above. The full matrix and vector uses a completely different ordering: for parallelisation reasons the pressure variables are interleaved with the spatial variables and dummy pressure variables are used for internal nodes. For example, in 2d, the ordering is [U1 V1 P1 , .. , Un Vn, Pn] where n is the total number of nodes.
Definition at line 65 of file StokesFlowPreconditionerAssembler.hpp.
Constructor & Destructor Documentation
| StokesFlowPreconditionerAssembler< DIM >::StokesFlowPreconditionerAssembler | ( | QuadraticMesh< DIM > * | pMesh, |
| StokesFlowProblemDefinition< DIM > * | pProblemDefinition | ||
| ) | [inline] |
Constructor
- Parameters:
-
pMesh mesh pProblemDefinition problem definition
Definition at line 106 of file StokesFlowPreconditionerAssembler.hpp.
Member Function Documentation
| c_matrix<double,PRESSURE_BLOCK_SIZE_ELEMENTAL,PRESSURE_BLOCK_SIZE_ELEMENTAL> StokesFlowPreconditionerAssembler< DIM >::ComputePressurePressureMatrixTerm | ( | c_vector< double, NUM_VERTICES_PER_ELEMENT > & | rLinearPhi, |
| c_matrix< double, DIM, NUM_VERTICES_PER_ELEMENT > & | rGradLinearPhi, | ||
| c_vector< double, DIM > & | rX, | ||
| Element< DIM, DIM > * | pElement | ||
| ) | [inline, private, virtual] |
For a continuum mechanics problem in mixed form (displacement-pressure or velocity-pressure), the matrix has the form (except see comments about ordering above) [A B1] [B2^T C ] The function is related to the pressure-pressure block, i.e. C
The method just returns C=M, the mass matrix.
- Parameters:
-
rLinearPhi All the linear basis functions on this element, evaluated at the current quad point rGradLinearPhi Gradients of all the linear basis functions on this element, evaluated at the current quad point rX Current location (physical position) pElement Current element
Reimplemented from AbstractContinuumMechanicsAssembler< DIM, true, true >.
Definition at line 91 of file StokesFlowPreconditionerAssembler.hpp.
Member Data Documentation
const unsigned StokesFlowPreconditionerAssembler< DIM >::NUM_VERTICES_PER_ELEMENT = DIM+1 [static, private] |
Number of vertices per element
Reimplemented from StokesFlowAssembler< DIM >.
Definition at line 69 of file StokesFlowPreconditionerAssembler.hpp.
const unsigned StokesFlowPreconditionerAssembler< DIM >::PRESSURE_BLOCK_SIZE_ELEMENTAL = NUM_VERTICES_PER_ELEMENT [static, private] |
Size of the pressure block, per element, equal num_vertices times 1 (as p solved for at each vertex.
Reimplemented from StokesFlowAssembler< DIM >.
Definition at line 75 of file StokesFlowPreconditionerAssembler.hpp.
The documentation for this class was generated from the following file:
- continuum_mechanics/src/solver/StokesFlowPreconditionerAssembler.hpp
