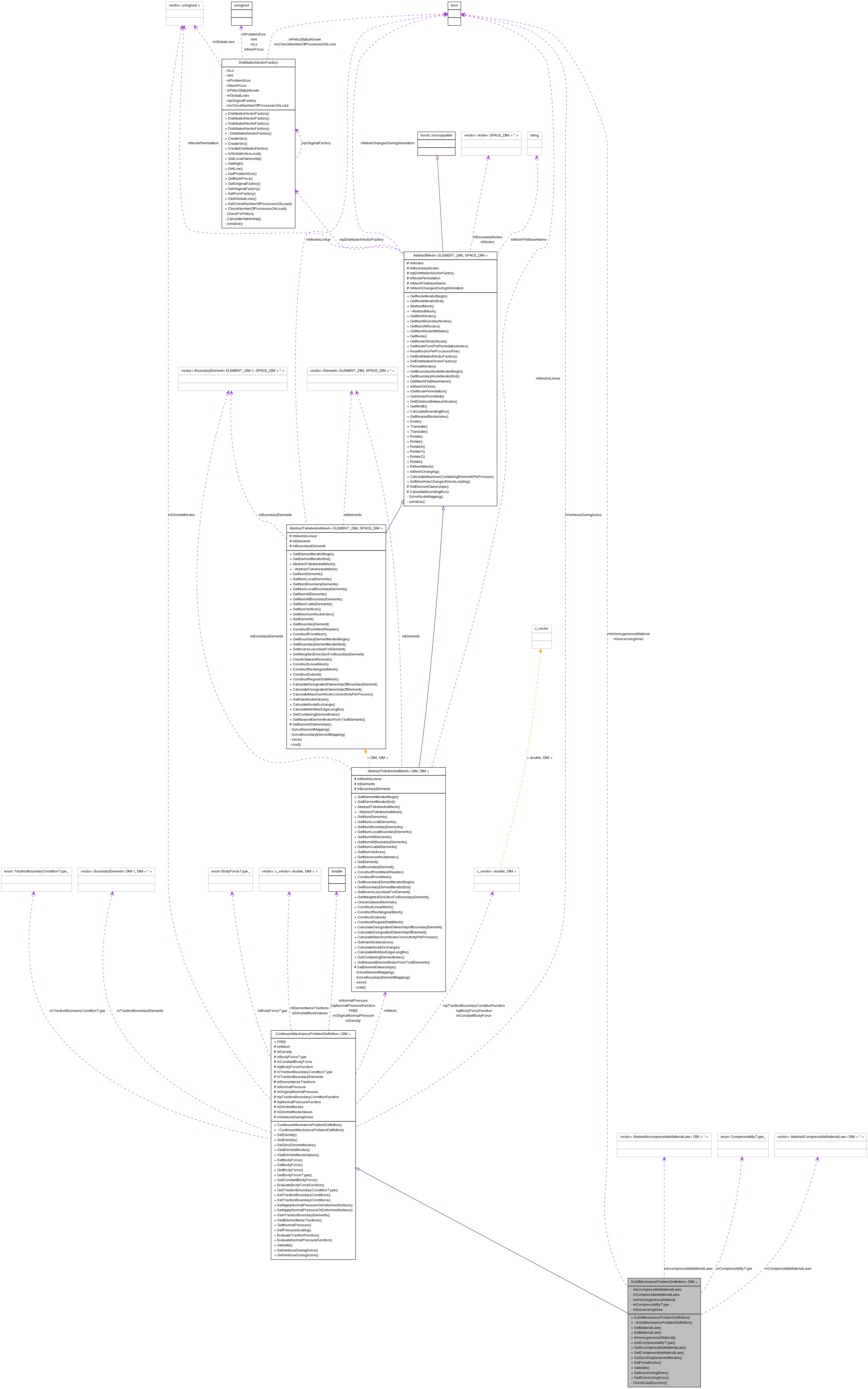
SolidMechanicsProblemDefinition< DIM > Class Template Reference
#include <SolidMechanicsProblemDefinition.hpp>
Inherits ContinuumMechanicsProblemDefinition< DIM >.
Inherited by ElectroMechanicsProblemDefinition< DIM >.
Public Member Functions | |
| SolidMechanicsProblemDefinition (AbstractTetrahedralMesh< DIM, DIM > &rMesh) | |
| virtual | ~SolidMechanicsProblemDefinition () |
| void | SetMaterialLaw (CompressibilityType compressibilityType, AbstractMaterialLaw< DIM > *pMaterialLaw) |
| void | SetMaterialLaw (CompressibilityType compressibilityType, std::vector< AbstractMaterialLaw< DIM > * > &rMaterialLaws) |
| bool | IsHomogeneousMaterial () |
| CompressibilityType | GetCompressibilityType () |
| AbstractIncompressibleMaterialLaw < DIM > * | GetIncompressibleMaterialLaw (unsigned elementIndex) |
| AbstractCompressibleMaterialLaw < DIM > * | GetCompressibleMaterialLaw (unsigned elementIndex) |
| void | SetZeroDisplacementNodes (std::vector< unsigned > &rFixedNodes) |
| void | SetFixedNodes (std::vector< unsigned > &rFixedNodes, std::vector< c_vector< double, DIM > > &rFixedNodeLocation) |
| virtual void | Validate () |
| void | SetSolveUsingSnes (bool solveUsingSnes=true) |
| bool | GetSolveUsingSnes () |
Private Member Functions | |
| void | CheckCastSuccess (CompressibilityType compressibilityType, AbstractMaterialLaw< DIM > *pMaterialLaw) |
Private Attributes | |
| std::vector < AbstractIncompressibleMaterialLaw < DIM > * > | mIncompressibleMaterialLaws |
| std::vector < AbstractCompressibleMaterialLaw < DIM > * > | mCompressibleMaterialLaws |
| bool | mIsHomogeneousMaterial |
| CompressibilityType | mCompressibilityType |
| bool | mSolveUsingSnes |
Detailed Description
template<unsigned DIM>
class SolidMechanicsProblemDefinition< DIM >
A class for specifying various parts of a solid mechanics problem, in particular the material laws for the deforming body, and (inheriting functionality from a base class): fixed nodes information, the body force (per unit mass) (usually acceleration due to gravity or zero), the traction boundary conditions, and the density.
Definition at line 50 of file SolidMechanicsProblemDefinition.hpp.
Constructor & Destructor Documentation
| SolidMechanicsProblemDefinition< DIM >::SolidMechanicsProblemDefinition | ( | AbstractTetrahedralMesh< DIM, DIM > & | rMesh | ) | [inline] |
Constructor. Note body force initialised to zero and density to 1.0
- Parameters:
-
rMesh Tesh being solved on
Definition at line 43 of file SolidMechanicsProblemDefinition.cpp.
| virtual SolidMechanicsProblemDefinition< DIM >::~SolidMechanicsProblemDefinition | ( | ) | [inline, virtual] |
Destructor
Definition at line 95 of file SolidMechanicsProblemDefinition.hpp.
Member Function Documentation
| void SolidMechanicsProblemDefinition< DIM >::CheckCastSuccess | ( | CompressibilityType | compressibilityType, | |
| AbstractMaterialLaw< DIM > * | pMaterialLaw | |||
| ) | [inline, private] |
Helper function for checking whether a dynamic_cast succeeded or not, and throwing an exception if it failed.
- Parameters:
-
compressibilityType compressibility type pMaterialLaw material law
Definition at line 202 of file SolidMechanicsProblemDefinition.cpp.
References EXCEPTION.
Referenced by SolidMechanicsProblemDefinition< DIM >::SetMaterialLaw().
| CompressibilityType SolidMechanicsProblemDefinition< DIM >::GetCompressibilityType | ( | ) | [inline] |
- Returns:
- whether the material is incompressible or compressible. SetMaterialLaw() must be called before calling this. (Which can be checked by calling Validate()).
Definition at line 155 of file SolidMechanicsProblemDefinition.cpp.
References SolidMechanicsProblemDefinition< DIM >::mCompressibilityType, SolidMechanicsProblemDefinition< DIM >::mCompressibleMaterialLaws, and SolidMechanicsProblemDefinition< DIM >::mIncompressibleMaterialLaws.
Referenced by CompressibleNonlinearElasticitySolver< DIM >::CompressibleNonlinearElasticitySolver(), IncompressibleNonlinearElasticitySolver< DIM >::IncompressibleNonlinearElasticitySolver(), and ElectroMechanicsProblemDefinition< DIM >::Validate().
| AbstractCompressibleMaterialLaw< DIM > * SolidMechanicsProblemDefinition< DIM >::GetCompressibleMaterialLaw | ( | unsigned | elementIndex | ) | [inline] |
- Returns:
- the material law for a given element, when the body is compressible. An assertion will fail if GetCompressibilityType()!=COMPRESSIBLE. If the material is homogeneous, it doesn't matter what the element index is.
- Parameters:
-
elementIndex index of element
Definition at line 184 of file SolidMechanicsProblemDefinition.cpp.
References AbstractMesh< ELEMENT_DIM, SPACE_DIM >::GetNumNodes(), SolidMechanicsProblemDefinition< DIM >::mCompressibilityType, SolidMechanicsProblemDefinition< DIM >::mCompressibleMaterialLaws, SolidMechanicsProblemDefinition< DIM >::mIncompressibleMaterialLaws, SolidMechanicsProblemDefinition< DIM >::mIsHomogeneousMaterial, and ContinuumMechanicsProblemDefinition< DIM >::mrMesh.
| AbstractIncompressibleMaterialLaw< DIM > * SolidMechanicsProblemDefinition< DIM >::GetIncompressibleMaterialLaw | ( | unsigned | elementIndex | ) | [inline] |
- Returns:
- the material law for a given element, when the body is incompressible. An assertion will fail if GetCompressibilityType()!=INCOMPRESSIBLE. If the material is homogeneous, it doesn't matter what the element index is.
- Parameters:
-
elementIndex index of element
Definition at line 166 of file SolidMechanicsProblemDefinition.cpp.
References AbstractMesh< ELEMENT_DIM, SPACE_DIM >::GetNumNodes(), SolidMechanicsProblemDefinition< DIM >::mCompressibilityType, SolidMechanicsProblemDefinition< DIM >::mCompressibleMaterialLaws, SolidMechanicsProblemDefinition< DIM >::mIncompressibleMaterialLaws, SolidMechanicsProblemDefinition< DIM >::mIsHomogeneousMaterial, and ContinuumMechanicsProblemDefinition< DIM >::mrMesh.
| bool SolidMechanicsProblemDefinition< DIM >::GetSolveUsingSnes | ( | ) | [inline] |
- Returns:
- whether solver should use PETSc SNES nonlinear solver or not
Definition at line 196 of file SolidMechanicsProblemDefinition.hpp.
References SolidMechanicsProblemDefinition< DIM >::mSolveUsingSnes.
| bool SolidMechanicsProblemDefinition< DIM >::IsHomogeneousMaterial | ( | ) | [inline] |
- Returns:
- whether the material is homogeneous or heterogeneous. SetMaterialLaw() must be called before calling this.
Definition at line 147 of file SolidMechanicsProblemDefinition.cpp.
References SolidMechanicsProblemDefinition< DIM >::mCompressibleMaterialLaws, SolidMechanicsProblemDefinition< DIM >::mIncompressibleMaterialLaws, and SolidMechanicsProblemDefinition< DIM >::mIsHomogeneousMaterial.
| void SolidMechanicsProblemDefinition< DIM >::SetFixedNodes | ( | std::vector< unsigned > & | rFixedNodes, | |
| std::vector< c_vector< double, DIM > > & | rFixedNodeLocation | |||
| ) | [inline] |
Set a list of nodes to be fixed, with their corresponding new LOCATIONS (not displacements). (This class will store as displacements though, and it is displacements that will be returned by rGetDirichletNodeValues).
- Parameters:
-
rFixedNodes the fixed node indices rFixedNodeLocation corresponding locations
Definition at line 52 of file SolidMechanicsProblemDefinition.cpp.
References ContinuumMechanicsProblemDefinition< DIM >::FREE, AbstractMesh< ELEMENT_DIM, SPACE_DIM >::GetNode(), ContinuumMechanicsProblemDefinition< DIM >::mDirichletNodes, ContinuumMechanicsProblemDefinition< DIM >::mDirichletNodeValues, and ContinuumMechanicsProblemDefinition< DIM >::mrMesh.
| void SolidMechanicsProblemDefinition< DIM >::SetMaterialLaw | ( | CompressibilityType | compressibilityType, | |
| std::vector< AbstractMaterialLaw< DIM > * > & | rMaterialLaws | |||
| ) | [inline] |
Set a vector of material laws for the body, one for each element in the mesh (the heterogeneous case). If compressibilityType==INCOMPRESSIBLE, the material law pointer will be checked at run-time that it is of type `AbstractIncompressibleMaterialLaw`, and similarly for the compressible case. Any previous material information will be deleted.
- Parameters:
-
compressibilityType either 'INCOMPRESSIBLE' or 'COMPRESSIBLE' rMaterialLaws Vector of pointers to material laws
Definition at line 110 of file SolidMechanicsProblemDefinition.cpp.
References SolidMechanicsProblemDefinition< DIM >::CheckCastSuccess(), AbstractTetrahedralMesh< ELEMENT_DIM, SPACE_DIM >::GetNumElements(), SolidMechanicsProblemDefinition< DIM >::mCompressibilityType, SolidMechanicsProblemDefinition< DIM >::mCompressibleMaterialLaws, SolidMechanicsProblemDefinition< DIM >::mIncompressibleMaterialLaws, SolidMechanicsProblemDefinition< DIM >::mIsHomogeneousMaterial, and ContinuumMechanicsProblemDefinition< DIM >::mrMesh.
| void SolidMechanicsProblemDefinition< DIM >::SetMaterialLaw | ( | CompressibilityType | compressibilityType, | |
| AbstractMaterialLaw< DIM > * | pMaterialLaw | |||
| ) | [inline] |
Set a material law for the entire body (ie the homogeneous case). If compressibilityType==INCOMPRESSIBLE, the material law pointer will be checked at run-time that it is of type `AbstractIncompressibleMaterialLaw`, and similarly for the compressible case. Any previous material information will be deleted.
- Parameters:
-
compressibilityType either 'INCOMPRESSIBLE' or 'COMPRESSIBLE' pMaterialLaw The material law for the entire body
Definition at line 83 of file SolidMechanicsProblemDefinition.cpp.
References SolidMechanicsProblemDefinition< DIM >::CheckCastSuccess(), SolidMechanicsProblemDefinition< DIM >::mCompressibilityType, SolidMechanicsProblemDefinition< DIM >::mCompressibleMaterialLaws, SolidMechanicsProblemDefinition< DIM >::mIncompressibleMaterialLaws, and SolidMechanicsProblemDefinition< DIM >::mIsHomogeneousMaterial.
Referenced by ElectroMechanicsProblemDefinition< DIM >::SetUseDefaultCardiacMaterialLaw().
| void SolidMechanicsProblemDefinition< DIM >::SetSolveUsingSnes | ( | bool | solveUsingSnes = true |
) | [inline] |
Tell the solver class whether to use the PETSc SNES solver (the petsc nonlinear solver) or its own nonlinear solve implementation.
- Parameters:
-
solveUsingSnes solve using Snes or not
Definition at line 188 of file SolidMechanicsProblemDefinition.hpp.
References SolidMechanicsProblemDefinition< DIM >::mSolveUsingSnes.
| void SolidMechanicsProblemDefinition< DIM >::SetZeroDisplacementNodes | ( | std::vector< unsigned > & | rFixedNodes | ) | [inline] |
Set a list of nodes (indices) to be fixed in space with zero displacement
- Parameters:
-
rFixedNodes the fixed nodes
Definition at line 155 of file SolidMechanicsProblemDefinition.hpp.
References ContinuumMechanicsProblemDefinition< DIM >::SetZeroDirichletNodes().
| void SolidMechanicsProblemDefinition< DIM >::Validate | ( | ) | [inline, virtual] |
Check all variables are set appropriately. Exceptions are thrown if any are not. Derived classes can override but should call this version as well.
Reimplemented from ContinuumMechanicsProblemDefinition< DIM >.
Reimplemented in ElectroMechanicsProblemDefinition< DIM >.
Definition at line 220 of file SolidMechanicsProblemDefinition.cpp.
References EXCEPTION, SolidMechanicsProblemDefinition< DIM >::mCompressibleMaterialLaws, and SolidMechanicsProblemDefinition< DIM >::mIncompressibleMaterialLaws.
Member Data Documentation
CompressibilityType SolidMechanicsProblemDefinition< DIM >::mCompressibilityType [private] |
Whether the material is incompressible or compressible. (CompressibilityType is an enumeration).
Definition at line 73 of file SolidMechanicsProblemDefinition.hpp.
Referenced by SolidMechanicsProblemDefinition< DIM >::GetCompressibilityType(), SolidMechanicsProblemDefinition< DIM >::GetCompressibleMaterialLaw(), SolidMechanicsProblemDefinition< DIM >::GetIncompressibleMaterialLaw(), and SolidMechanicsProblemDefinition< DIM >::SetMaterialLaw().
std::vector<AbstractCompressibleMaterialLaw<DIM>*> SolidMechanicsProblemDefinition< DIM >::mCompressibleMaterialLaws [private] |
The material law, in the case of compressible material laws. This vector is either of size 1, representing a homogeneous material, or of size num_elements, representing a heterogeneous material, with a material law per element. If the material is incompressible, this vector will be of size zero.
Definition at line 67 of file SolidMechanicsProblemDefinition.hpp.
Referenced by SolidMechanicsProblemDefinition< DIM >::GetCompressibilityType(), SolidMechanicsProblemDefinition< DIM >::GetCompressibleMaterialLaw(), SolidMechanicsProblemDefinition< DIM >::GetIncompressibleMaterialLaw(), SolidMechanicsProblemDefinition< DIM >::IsHomogeneousMaterial(), SolidMechanicsProblemDefinition< DIM >::SetMaterialLaw(), and SolidMechanicsProblemDefinition< DIM >::Validate().
std::vector<AbstractIncompressibleMaterialLaw<DIM>*> SolidMechanicsProblemDefinition< DIM >::mIncompressibleMaterialLaws [private] |
The material law, in the case of incompressible material laws. This vector is either of size 1, representing a homogeneous material, or of size num_elements, representing a heterogeneous material, with a material law per element. If he material is compressible, this vector will be of size zero.
Definition at line 61 of file SolidMechanicsProblemDefinition.hpp.
Referenced by SolidMechanicsProblemDefinition< DIM >::GetCompressibilityType(), SolidMechanicsProblemDefinition< DIM >::GetCompressibleMaterialLaw(), SolidMechanicsProblemDefinition< DIM >::GetIncompressibleMaterialLaw(), SolidMechanicsProblemDefinition< DIM >::IsHomogeneousMaterial(), SolidMechanicsProblemDefinition< DIM >::SetMaterialLaw(), and SolidMechanicsProblemDefinition< DIM >::Validate().
bool SolidMechanicsProblemDefinition< DIM >::mIsHomogeneousMaterial [private] |
Whether the material is homogeneous (same material law everywhere) or heterogeneous
Definition at line 70 of file SolidMechanicsProblemDefinition.hpp.
Referenced by SolidMechanicsProblemDefinition< DIM >::GetCompressibleMaterialLaw(), SolidMechanicsProblemDefinition< DIM >::GetIncompressibleMaterialLaw(), SolidMechanicsProblemDefinition< DIM >::IsHomogeneousMaterial(), and SolidMechanicsProblemDefinition< DIM >::SetMaterialLaw().
bool SolidMechanicsProblemDefinition< DIM >::mSolveUsingSnes [private] |
Whether the solver will use Petsc SNES or not. See dox for Set method below
Definition at line 76 of file SolidMechanicsProblemDefinition.hpp.
Referenced by SolidMechanicsProblemDefinition< DIM >::GetSolveUsingSnes(), and SolidMechanicsProblemDefinition< DIM >::SetSolveUsingSnes().
The documentation for this class was generated from the following files:
- continuum_mechanics/src/problem/SolidMechanicsProblemDefinition.hpp
- continuum_mechanics/src/problem/SolidMechanicsProblemDefinition.cpp