|
Chaste
Release::3.4
|
|
Chaste
Release::3.4
|
#include <ExplicitCardiacMechanicsSolver.hpp>
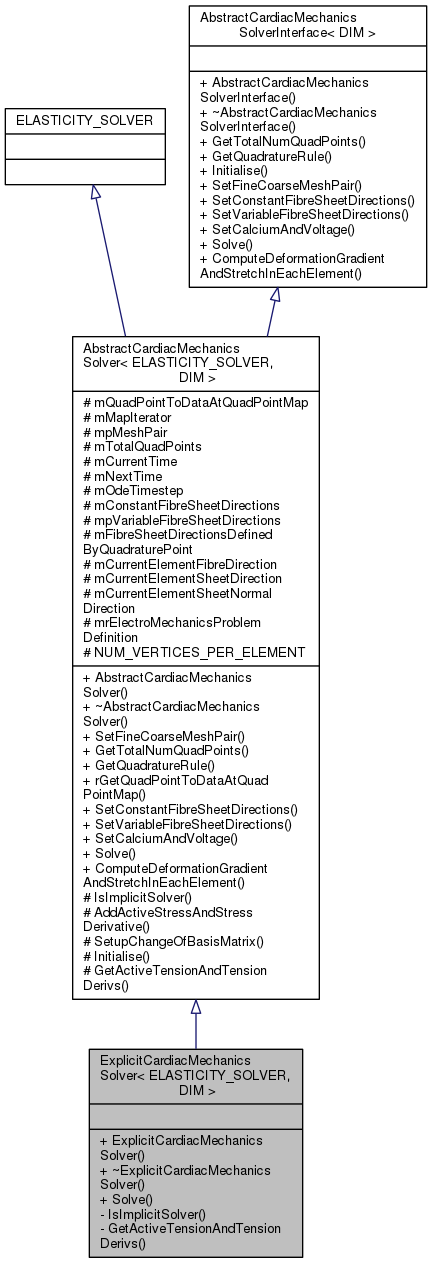
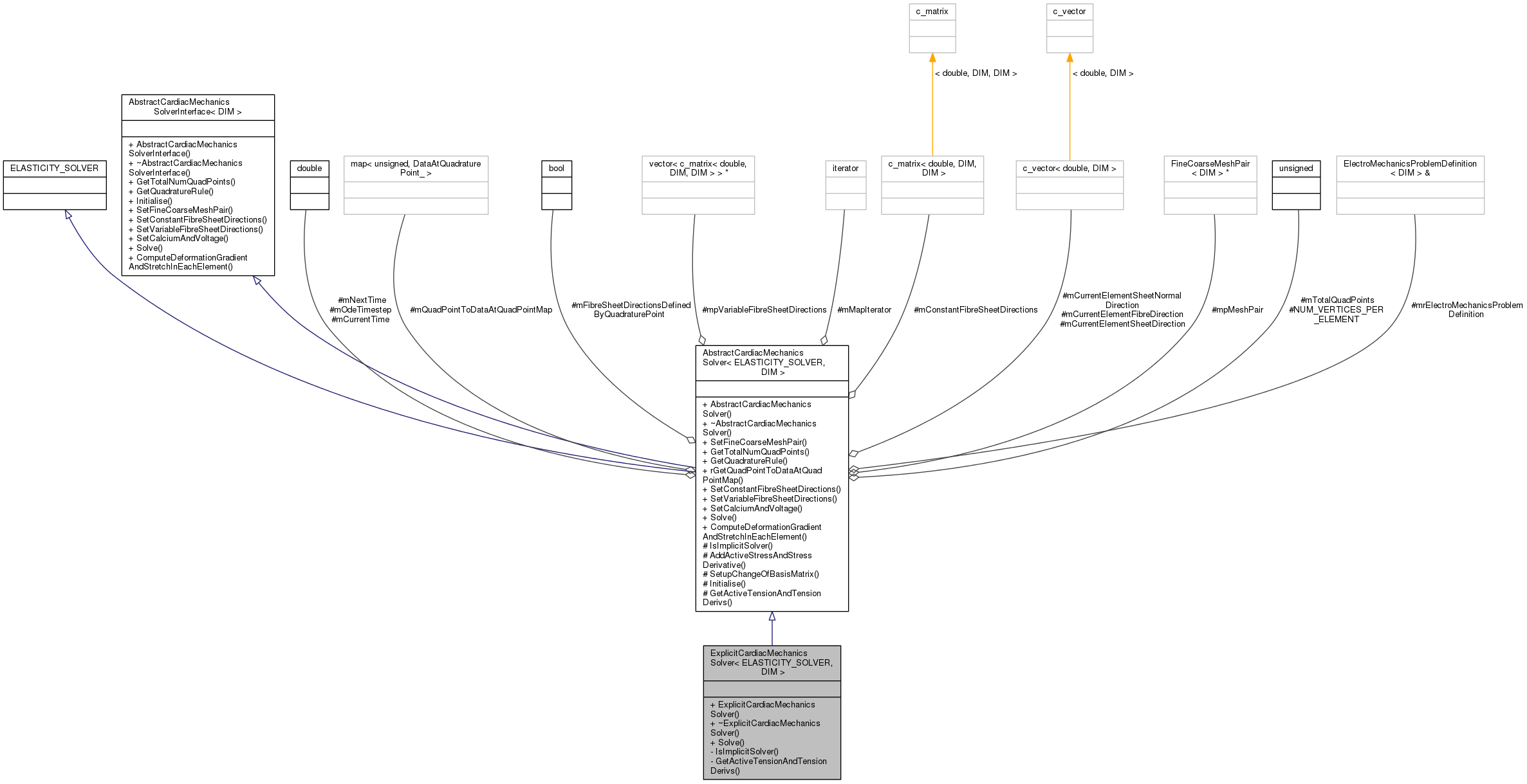
 Inheritance diagram for ExplicitCardiacMechanicsSolver< ELASTICITY_SOLVER, DIM >: Collaboration diagram for ExplicitCardiacMechanicsSolver< ELASTICITY_SOLVER, DIM >:
Inheritance diagram for ExplicitCardiacMechanicsSolver< ELASTICITY_SOLVER, DIM >: Collaboration diagram for ExplicitCardiacMechanicsSolver< ELASTICITY_SOLVER, DIM >:Private Member Functions | |
| bool | IsImplicitSolver () |
| void | GetActiveTensionAndTensionDerivs (double currentFibreStretch, unsigned currentQuadPointGlobalIndex, bool assembleJacobian, double &rActiveTension, double &rDerivActiveTensionWrtLambda, double &rDerivActiveTensionWrtDLambdaDt) |
Friends | |
| class | TestExplicitCardiacMechanicsSolver |
Explicit cardiac mechanics solver for solving electromechanic problems where the contraction model is not stretch-rate-dependent (for those the implicit solver is needed).
The first template parameter should be either IncompressibleNonlinearElasticitySolver or CompressibleNonlinearElasticityAssembler; this will be the class that this class ultimately inherits from.
The general explicit solution procedure is to do, each timestep: (0) [solve the electrics and interpolate Ca and voltage onto quad points (i) pass Ca and voltage to the contraction models (ii) pass the fibre stretch to the contraction models in case this is needed. (iii) integrate the contraction models in order to get the active tension (iv) solve for the deformation using this active tension.
Definition at line 61 of file ExplicitCardiacMechanicsSolver.hpp.
| ExplicitCardiacMechanicsSolver< ELASTICITY_SOLVER, DIM >::ExplicitCardiacMechanicsSolver | ( | QuadraticMesh< DIM > & | rQuadMesh, |
| ElectroMechanicsProblemDefinition< DIM > & | rProblemDefinition, | ||
| std::string | outputDirectory | ||
| ) |
Constructor
| rQuadMesh | A reference to the mesh. |
| rProblemDefinition | Object defining body force and boundary conditions |
| outputDirectory | The output directory, relative to TEST_OUTPUT |
Definition at line 39 of file ExplicitCardiacMechanicsSolver.cpp.
|
virtual |
Destructor
Definition at line 50 of file ExplicitCardiacMechanicsSolver.cpp.
|
privatevirtual |
Get the active tension and other info at the given quadrature point. This is an explicit solver so just sets the active tension, it doesn't set the derivatives. It stores the stretch for the next timestep.
| currentFibreStretch | The stretch in the fibre direction |
| currentQuadPointGlobalIndex | Quadrature point integrand currently being evaluated at in AssembleOnElement. |
| assembleJacobian | A bool stating whether to assemble the Jacobian matrix. |
| rActiveTension | The returned active tension. |
| rDerivActiveTensionWrtLambda | The returned dT_dLam, derivative of active tension wrt stretch. Unset in this explicit solver. |
| rDerivActiveTensionWrtDLambdaDt | The returned dT_dLamDot, derivative of active tension wrt stretch rate. Unset in this explicit solver. |
Implements AbstractCardiacMechanicsSolver< ELASTICITY_SOLVER, DIM >.
Definition at line 55 of file ExplicitCardiacMechanicsSolver.cpp.
References DataAtQuadraturePoint_::ContractionModel, AbstractContractionModel::GetActiveTension(), and DataAtQuadraturePoint_::Stretch.
|
inlineprivatevirtual |
Implements AbstractCardiacMechanicsSolver< ELASTICITY_SOLVER, DIM >.
Definition at line 67 of file ExplicitCardiacMechanicsSolver.hpp.
|
virtual |
Solve for the deformation using quasi-static nonlinear elasticity. (not dynamic nonlinear elasticity, despite the times taken in - just ONE deformation is solved for. The cell models are integrated explicitly over the time range using the ODE timestep provided then the active tension used to solve for the deformation
| time | the current time |
| nextTime | the next time |
| odeTimestep | the ODE timestep |
Implements AbstractCardiacMechanicsSolver< ELASTICITY_SOLVER, DIM >.
Definition at line 89 of file ExplicitCardiacMechanicsSolver.cpp.
References AbstractContractionModel::RunAndUpdate(), and AbstractContractionModel::SetStretchAndStretchRate().
 1.8.6
1.8.6