#include <AbstractNonlinearElasticitySolver.hpp>
 Inheritance diagram for AbstractNonlinearElasticitySolver< DIM >:
Inheritance diagram for AbstractNonlinearElasticitySolver< DIM >: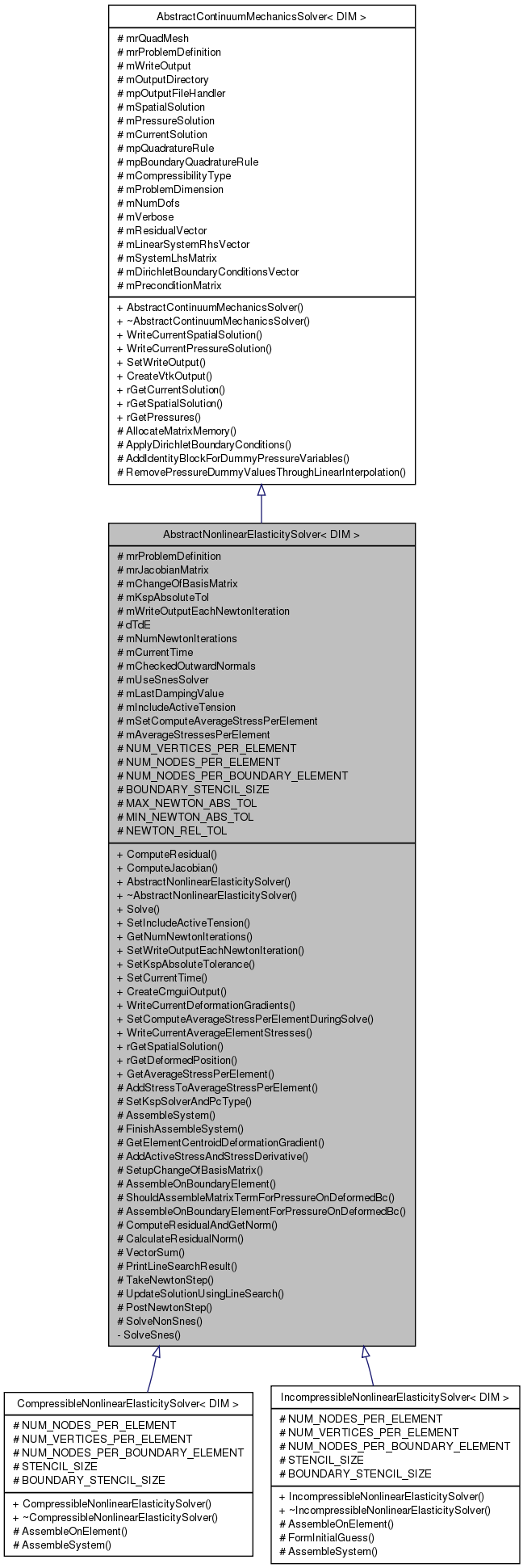 Collaboration diagram for AbstractNonlinearElasticitySolver< DIM >:
Collaboration diagram for AbstractNonlinearElasticitySolver< DIM >: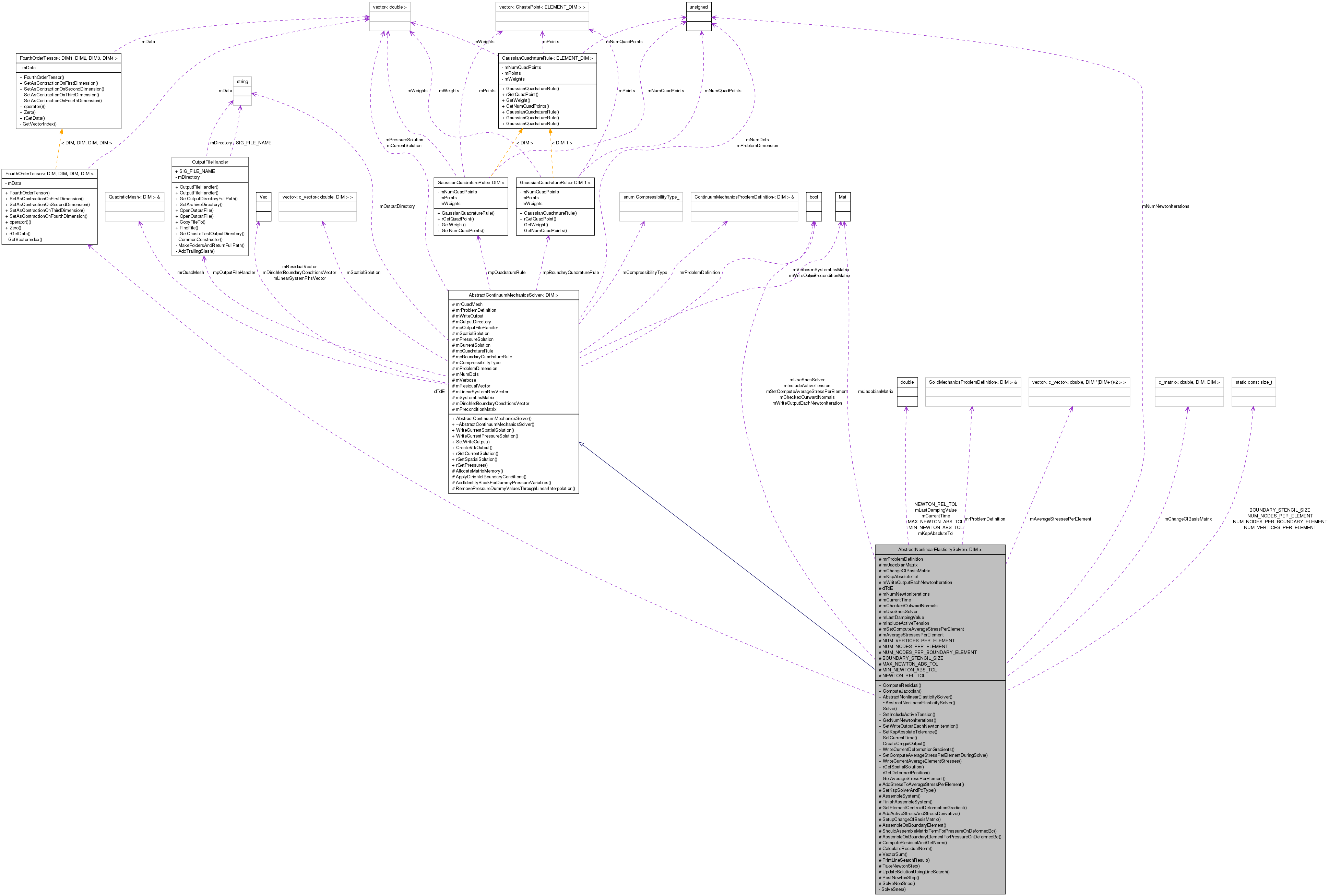
Public Member Functions | |
| void | ComputeResidual (Vec currentGuess, Vec residualVector) |
| void | ComputeJacobian (Vec currentGuess, Mat *pJacobian, Mat *pPreconditioner) |
| AbstractNonlinearElasticitySolver (QuadraticMesh< DIM > &rQuadMesh, SolidMechanicsProblemDefinition< DIM > &rProblemDefinition, std::string outputDirectory, CompressibilityType compressibilityType) | |
| virtual | ~AbstractNonlinearElasticitySolver () |
| void | Solve (double tol=-1.0) |
| void | SetIncludeActiveTension (bool includeActiveTension=true) |
| unsigned | GetNumNewtonIterations () |
| void | SetWriteOutputEachNewtonIteration (bool writeOutputEachNewtonIteration=true) |
| void | SetKspAbsoluteTolerance (double kspAbsoluteTolerance) |
| void | SetCurrentTime (double time) |
| void | CreateCmguiOutput () |
| void | WriteCurrentDeformationGradients (std::string fileName, int counterToAppend=-1) |
| void | SetComputeAverageStressPerElementDuringSolve (bool setComputeAverageStressPerElement=true) |
| void | WriteCurrentAverageElementStresses (std::string fileName, int counterToAppend=-1) |
| std::vector< c_vector< double, DIM > > & | rGetSpatialSolution () |
| std::vector< c_vector< double, DIM > > & | rGetDeformedPosition () |
| c_matrix< double, DIM, DIM > | GetAverageStressPerElement (unsigned elementIndex) |
Protected Member Functions | |
| void | AddStressToAverageStressPerElement (c_matrix< double, DIM, DIM > &rT, unsigned elementIndex) |
| virtual void | SetKspSolverAndPcType (KSP solver) |
| virtual void | AssembleSystem (bool assembleResidual, bool assembleLinearSystem)=0 |
| virtual void | FinishAssembleSystem (bool assembleResidual, bool assembleLinearSystem) |
| void | GetElementCentroidDeformationGradient (Element< DIM, DIM > &rElement, c_matrix< double, DIM, DIM > &rDeformationGradient) |
| virtual void | AddActiveStressAndStressDerivative (c_matrix< double, DIM, DIM > &rC, unsigned elementIndex, unsigned currentQuadPointGlobalIndex, c_matrix< double, DIM, DIM > &rT, FourthOrderTensor< DIM, DIM, DIM, DIM > &rDTdE, bool addToDTdE) |
| virtual void | SetupChangeOfBasisMatrix (unsigned elementIndex, unsigned currentQuadPointGlobalIndex) |
| void | AssembleOnBoundaryElement (BoundaryElement< DIM-1, DIM > &rBoundaryElement, c_matrix< double, BOUNDARY_STENCIL_SIZE, BOUNDARY_STENCIL_SIZE > &rAelem, c_vector< double, BOUNDARY_STENCIL_SIZE > &rBelem, bool assembleResidual, bool assembleJacobian, unsigned boundaryConditionIndex) |
| bool | ShouldAssembleMatrixTermForPressureOnDeformedBc () |
| void | AssembleOnBoundaryElementForPressureOnDeformedBc (BoundaryElement< DIM-1, DIM > &rBoundaryElement, c_matrix< double, BOUNDARY_STENCIL_SIZE, BOUNDARY_STENCIL_SIZE > &rAelem, c_vector< double, BOUNDARY_STENCIL_SIZE > &rBelem, bool assembleResidual, bool assembleJacobian, unsigned boundaryConditionIndex) |
| double | ComputeResidualAndGetNorm (bool allowException) |
| double | CalculateResidualNorm () |
| void | VectorSum (std::vector< double > &rX, ReplicatableVector &rY, double a, std::vector< double > &rZ) |
| void | PrintLineSearchResult (double s, double residNorm) |
| double | TakeNewtonStep () |
| double | UpdateSolutionUsingLineSearch (Vec solution) |
| virtual void | PostNewtonStep (unsigned counter, double normResidual) |
| void | SolveNonSnes (double tol=-1.0) |
Protected Attributes | |
| SolidMechanicsProblemDefinition < DIM > & | mrProblemDefinition |
| Mat & | mrJacobianMatrix |
| c_matrix< double, DIM, DIM > | mChangeOfBasisMatrix |
| double | mKspAbsoluteTol |
| bool | mWriteOutputEachNewtonIteration |
| FourthOrderTensor< DIM, DIM, DIM, DIM > | dTdE |
| unsigned | mNumNewtonIterations |
| double | mCurrentTime |
| bool | mCheckedOutwardNormals |
| bool | mUseSnesSolver |
| double | mLastDampingValue |
| bool | mIncludeActiveTension |
| bool | mSetComputeAverageStressPerElement |
| std::vector< c_vector< double, DIM *(DIM+1)/2 > > | mAverageStressesPerElement |
Static Protected Attributes | |
| static const size_t | NUM_VERTICES_PER_ELEMENT = DIM+1 |
| static const size_t | NUM_NODES_PER_ELEMENT = (DIM+1)*(DIM+2)/2 |
| static const size_t | NUM_NODES_PER_BOUNDARY_ELEMENT = DIM*(DIM+1)/2 |
| static const size_t | BOUNDARY_STENCIL_SIZE = DIM*NUM_NODES_PER_BOUNDARY_ELEMENT |
| static double | MAX_NEWTON_ABS_TOL = 1e-7 |
| static double | MIN_NEWTON_ABS_TOL = 1e-10 |
| static double | NEWTON_REL_TOL = 1e-4 |
Private Member Functions | |
| void | SolveSnes () |
Detailed Description
template<unsigned DIM>
class AbstractNonlinearElasticitySolver< DIM >
Abstract nonlinear elasticity solver. IncompressibleNonlinearElasticityAssembler and CompressibleNonlinearElasticityAssembler inherit from this class.
The class is both a solver AND a assembler: the AssembleOnElement(), AssembleSystem() methods are hardcoded into this class. In principle something like AbstractContinuumMechanicsAssembler could have been used as a member variable [that class is used for assembling fluids matrices etc] but nonlinear elasticity is too complex for the that class to be used, as things like stress and stress-derivative need to be computed at the AssembleOnElement level, things like pressure-on-deformed-surface are deformation dependent boundary conditions, etc. *
Definition at line 115 of file AbstractNonlinearElasticitySolver.hpp.
Constructor & Destructor Documentation
| AbstractNonlinearElasticitySolver< DIM >::AbstractNonlinearElasticitySolver | ( | QuadraticMesh< DIM > & | rQuadMesh, |
| SolidMechanicsProblemDefinition< DIM > & | rProblemDefinition, | ||
| std::string | outputDirectory, | ||
| CompressibilityType | compressibilityType | ||
| ) |
Constructor.
- Parameters:
-
rQuadMesh the quadratic mesh rProblemDefinition an object defining in particular the body force and boundary conditions outputDirectory output directory compressibilityType Should be equal to COMPRESSIBLE or INCOMPRESSIBLE (see enumeration defined at top of file) (depending on which concrete class is inheriting from this) and is only used in computing mNumDofs and allocating matrix memory.
Definition at line 672 of file AbstractNonlinearElasticitySolver.hpp.
References CommandLineArguments::Instance(), AbstractNonlinearElasticitySolver< DIM >::mChangeOfBasisMatrix, AbstractNonlinearElasticitySolver< DIM >::mrProblemDefinition, AbstractNonlinearElasticitySolver< DIM >::mUseSnesSolver, and CommandLineArguments::OptionExists().
| AbstractNonlinearElasticitySolver< DIM >::~AbstractNonlinearElasticitySolver | ( | ) | [virtual] |
Destructor.
Definition at line 695 of file AbstractNonlinearElasticitySolver.hpp.
Member Function Documentation
| virtual void AbstractNonlinearElasticitySolver< DIM >::AddActiveStressAndStressDerivative | ( | c_matrix< double, DIM, DIM > & | rC, |
| unsigned | elementIndex, | ||
| unsigned | currentQuadPointGlobalIndex, | ||
| c_matrix< double, DIM, DIM > & | rT, | ||
| FourthOrderTensor< DIM, DIM, DIM, DIM > & | rDTdE, | ||
| bool | addToDTdE | ||
| ) | [inline, protected, virtual] |
Add on the active component to the stress (and maybe also to the stress-derivative). This is called after getting the passive stress and stress-derivative from a material law.
This method does nothing but can be overloaded by the other solvers, see eg cardiac mechanics solvers.
- Parameters:
-
rC The Lagrangian deformation tensor (F^T F) elementIndex Index of the current element currentQuadPointGlobalIndex The index (assuming an outer loop over elements and an inner loop over quadrature points), of the current quadrature point. rT The stress to be added to rDTdE the stress derivative to be added to, assuming the final parameter is true addToDTdE A boolean flag saying whether the stress derivative is required or not.
Definition at line 321 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::AddStressToAverageStressPerElement | ( | c_matrix< double, DIM, DIM > & | rT, |
| unsigned | elementIndex | ||
| ) | [protected] |
Add the given stress tensor to the store of average stresses. mSetComputeAverageStressPerElement must be true
- Parameters:
-
rT 2nd PK stress (matrix is assumed symmetric) elementIndex element index
Definition at line 879 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::AssembleOnBoundaryElement | ( | BoundaryElement< DIM-1, DIM > & | rBoundaryElement, |
| c_matrix< double, BOUNDARY_STENCIL_SIZE, BOUNDARY_STENCIL_SIZE > & | rAelem, | ||
| c_vector< double, BOUNDARY_STENCIL_SIZE > & | rBelem, | ||
| bool | assembleResidual, | ||
| bool | assembleJacobian, | ||
| unsigned | boundaryConditionIndex | ||
| ) | [protected] |
Compute the term from the surface integral of s*phi, where s is a specified non-zero surface traction (ie Neumann boundary condition) to be added to the residual vector.
Calls AssembleOnBoundaryElementForPressureOnDeformedBc() if appropriate
- Parameters:
-
rBoundaryElement the boundary element to be integrated on rAelem The element's contribution to the LHS matrix is returned. There is no need to zero this matrix before calling. rBelem The element's contribution to the RHS vector is returned. There is no need to zero this vector before calling. assembleResidual A bool stating whether to assemble the residual vector. assembleJacobian A bool stating whether to assemble the Jacobian matrix. boundaryConditionIndex index of this boundary (in the vectors in the problem definition object, in which the boundary conditions are stored
Definition at line 1022 of file AbstractNonlinearElasticitySolver.hpp.
References QuadraticBasisFunction< ELEMENT_DIM >::ComputeBasisFunctions(), AbstractElement< ELEMENT_DIM, SPACE_DIM >::GetIndex(), AbstractElement< ELEMENT_DIM, SPACE_DIM >::GetNodeGlobalIndex(), and NEVER_REACHED.
| void AbstractNonlinearElasticitySolver< DIM >::AssembleOnBoundaryElementForPressureOnDeformedBc | ( | BoundaryElement< DIM-1, DIM > & | rBoundaryElement, |
| c_matrix< double, BOUNDARY_STENCIL_SIZE, BOUNDARY_STENCIL_SIZE > & | rAelem, | ||
| c_vector< double, BOUNDARY_STENCIL_SIZE > & | rBelem, | ||
| bool | assembleResidual, | ||
| bool | assembleJacobian, | ||
| unsigned | boundaryConditionIndex | ||
| ) | [protected] |
Alternative version of AssembleOnBoundaryElement which is used for problems where a normal pressure is applied to the deformed body. The traction then depends on the current deformation, specifically s = -det(F)*P*F^{-T}N.
To compute F we have to find the volume element containing this surface element and use this in the computation. See comments in implementation for more details.
- Parameters:
-
rBoundaryElement the boundary element to be integrated on rAelem The element's contribution to the LHS matrix is returned. There is no need to zero this matrix before calling. rBelem The element's contribution to the RHS vector is returned. There is no need to zero this vector before calling. assembleResidual A bool stating whether to assemble the residual vector. assembleJacobian A bool stating whether to assemble the Jacobian matrix. boundaryConditionIndex index of this boundary (in the vectors in the problem definition object, in which the boundary conditions are stored
Definition at line 1124 of file AbstractNonlinearElasticitySolver.hpp.
References Element< ELEMENT_DIM, SPACE_DIM >::CalculateInterpolationWeights(), AbstractTetrahedralElement< ELEMENT_DIM, SPACE_DIM >::CalculateNormal(), QuadraticBasisFunction< ELEMENT_DIM >::ComputeBasisFunctions(), QuadraticBasisFunction< ELEMENT_DIM >::ComputeTransformedBasisFunctionDerivatives(), Determinant(), AbstractElement< ELEMENT_DIM, SPACE_DIM >::GetIndex(), AbstractElement< ELEMENT_DIM, SPACE_DIM >::GetNode(), AbstractElement< ELEMENT_DIM, SPACE_DIM >::GetNodeGlobalIndex(), AbstractElement< ELEMENT_DIM, SPACE_DIM >::GetNumNodes(), Inverse(), and NEVER_REACHED.
| virtual void AbstractNonlinearElasticitySolver< DIM >::AssembleSystem | ( | bool | assembleResidual, |
| bool | assembleLinearSystem | ||
| ) | [protected, pure virtual] |
Assemble the residual vector and/or Jacobian matrix (using the current solution stored in mCurrentSolution, output going to mResidualVector and/or mrJacobianMatrix).
Must be overridden in concrete derived classes.
- Parameters:
-
assembleResidual A bool stating whether to assemble the residual vector. assembleLinearSystem A bool stating whether to assemble the Jacobian matrix and the RHS vector of the linear system (which is based on the residual but could be slightly different due to the way dirichlet boundary conditions are applied to the linear system - see comments in ApplyDirichletBoundaryConditions).
Implemented in CompressibleNonlinearElasticitySolver< DIM >, and IncompressibleNonlinearElasticitySolver< DIM >.
| double AbstractNonlinearElasticitySolver< DIM >::CalculateResidualNorm | ( | ) | [protected] |
Calculate |r|_2 / length(r), where r is the current residual vector.
Definition at line 1530 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::ComputeJacobian | ( | Vec | currentGuess, |
| Mat * | pJacobian, | ||
| Mat * | pPreconditioner | ||
| ) |
Public method for computing the jacobian that will be called, effectively, by the SNES solver
- Parameters:
-
currentGuess Input, the current guess for the solution pJacobian Output, the jacobian matrix at this guess pPreconditioner Output, the preconditioner matrix
Definition at line 2028 of file AbstractNonlinearElasticitySolver.hpp.
References GenericEventHandler< 7, MechanicsEventHandler >::BeginEvent(), GenericEventHandler< 7, MechanicsEventHandler >::EndEvent(), and ReplicatableVector::GetSize().
| void AbstractNonlinearElasticitySolver< DIM >::ComputeResidual | ( | Vec | currentGuess, |
| Vec | residualVector | ||
| ) |
Public method for computing the residual that will be called, effectively, by the SNES solver
- Parameters:
-
currentGuess Input, the current guess for the solution residualVector Output, the residual vector given this guess.
Definition at line 2012 of file AbstractNonlinearElasticitySolver.hpp.
References ReplicatableVector::GetSize().
| double AbstractNonlinearElasticitySolver< DIM >::ComputeResidualAndGetNorm | ( | bool | allowException | ) | [protected] |
Set up the residual vector (using the current solution), and get its scaled norm (Calculate |r|_2 / length(r), where r is residual vector).
- Parameters:
-
allowException Sometimes the current solution solution will be such that the residual vector cannot be computed, as (say) the material law will throw an exception as the strains are too large. If this bool is set to true, the exception will be caught, and DBL_MAX returned as the residual norm
Definition at line 1504 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::CreateCmguiOutput | ( | ) |
Convert the output to Cmgui format (placed in a folder called cmgui in the output directory). Writes the original mesh as solution_0.exnode and the (current) solution as solution_1.exnode.
Definition at line 845 of file AbstractNonlinearElasticitySolver.hpp.
References EXCEPTION, CmguiDeformedSolutionsWriter< DIM >::WriteCmguiScript(), CmguiDeformedSolutionsWriter< DIM >::WriteDeformationPositions(), and CmguiDeformedSolutionsWriter< DIM >::WriteInitialMesh().
| void AbstractNonlinearElasticitySolver< DIM >::FinishAssembleSystem | ( | bool | assembleResidual, |
| bool | assembleLinearSystem | ||
| ) | [protected, virtual] |
To be called at the end of AssembleSystem. Calls (Petsc) assemble methods on the Vecs and Mat, and calls ApplyDirichletBoundaryConditions.
- Parameters:
-
assembleResidual see documentation for AssembleSystem assembleLinearSystem see documentation for AssembleSystem
Definition at line 701 of file AbstractNonlinearElasticitySolver.hpp.
References PetscMatTools::Finalise(), PetscVecTools::Finalise(), and PetscMatTools::SwitchWriteMode().
| c_matrix< double, DIM, DIM > AbstractNonlinearElasticitySolver< DIM >::GetAverageStressPerElement | ( | unsigned | elementIndex | ) |
If SetComputeAverageStressPerElementDuringSolve() was called before the Solve(), then this method can be used to get the average stress for a particular element.
- Parameters:
-
elementIndex elementIndex
Definition at line 913 of file AbstractNonlinearElasticitySolver.hpp.
References EXCEPTION.
| void AbstractNonlinearElasticitySolver< DIM >::GetElementCentroidDeformationGradient | ( | Element< DIM, DIM > & | rElement, |
| c_matrix< double, DIM, DIM > & | rDeformationGradient | ||
| ) | [protected] |
Compute the deformation gradient at the centroid at an element
- Parameters:
-
rElement The element rDeformationGradient Reference to a matrix, which will be filled in by this method.
Definition at line 956 of file AbstractNonlinearElasticitySolver.hpp.
References QuadraticBasisFunction< ELEMENT_DIM >::ComputeTransformedBasisFunctionDerivatives(), AbstractElement< ELEMENT_DIM, SPACE_DIM >::GetIndex(), AbstractElement< ELEMENT_DIM, SPACE_DIM >::GetNodeGlobalIndex(), and ChastePoint< DIM >::rGetLocation().
| unsigned AbstractNonlinearElasticitySolver< DIM >::GetNumNewtonIterations | ( | ) |
Get number of Newton iterations taken in last solve.
Definition at line 1924 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::PostNewtonStep | ( | unsigned | counter, |
| double | normResidual | ||
| ) | [protected, virtual] |
This function may be overloaded by subclasses. It is called after each Newton iteration.
- Parameters:
-
counter current newton iteration number normResidual norm of the residual
Definition at line 1832 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::PrintLineSearchResult | ( | double | s, |
| double | residNorm | ||
| ) | [protected] |
Print to std::cout the residual norm for this s, ie ||f(x+su)|| where f is the residual vector, x the current solution and u the update vector.
- Parameters:
-
s s residNorm residual norm.
Definition at line 1727 of file AbstractNonlinearElasticitySolver.hpp.
| std::vector< c_vector< double, DIM > > & AbstractNonlinearElasticitySolver< DIM >::rGetDeformedPosition | ( | ) |
Get the deformed position. Note: return_value[i](j) = x_j for node i. Just calls rGetSpatialSolution().
Definition at line 752 of file AbstractNonlinearElasticitySolver.hpp.
| std::vector< c_vector< double, DIM > > & AbstractNonlinearElasticitySolver< DIM >::rGetSpatialSolution | ( | ) | [virtual] |
Implemented method, returns the deformed position. Note: return_value[i](j) = x_j for node i.
Implements AbstractContinuumMechanicsSolver< DIM >.
Definition at line 737 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::SetComputeAverageStressPerElementDuringSolve | ( | bool | setComputeAverageStressPerElement = true | ) |
The user may request that the stress for each element (averaged over quadrature point stresses) are saved during the Solve(), by calling this.
- Parameters:
-
setComputeAverageStressPerElement whether to compute stresses (defaults to true)
Definition at line 864 of file AbstractNonlinearElasticitySolver.hpp.
References EXCEPTION, and PetscTools::IsParallel().
| void AbstractNonlinearElasticitySolver< DIM >::SetCurrentTime | ( | double | time | ) | [inline] |
This solver is for static problems, however the body force or surface tractions could be a function of time. This method is for setting the time.
- Parameters:
-
time current time
Definition at line 597 of file AbstractNonlinearElasticitySolver.hpp.
References AbstractNonlinearElasticitySolver< DIM >::mCurrentTime.
| void AbstractNonlinearElasticitySolver< DIM >::SetIncludeActiveTension | ( | bool | includeActiveTension = true | ) | [inline] |
Whether to call AddActiveStressAndStressDerivative() when computing stresses or not.
Subclasses, such as the cardiac mechanics solvers, may implement the above method to add active contributions to the stress. However, sometimes we might want to switch this off, which is what this function is for - will generally be called with includeActiveTension=false
- Parameters:
-
includeActiveTension whether to include active tension
Definition at line 556 of file AbstractNonlinearElasticitySolver.hpp.
References AbstractNonlinearElasticitySolver< DIM >::mIncludeActiveTension.
| void AbstractNonlinearElasticitySolver< DIM >::SetKspAbsoluteTolerance | ( | double | kspAbsoluteTolerance | ) | [inline] |
Set the absolute tolerance to be used when solving the linear system. If this is not called a relative tolerance is used.
- Parameters:
-
kspAbsoluteTolerance the tolerance
Definition at line 585 of file AbstractNonlinearElasticitySolver.hpp.
References AbstractNonlinearElasticitySolver< DIM >::mKspAbsoluteTol.
| void AbstractNonlinearElasticitySolver< DIM >::SetKspSolverAndPcType | ( | KSP | solver | ) | [protected, virtual] |
Set the KSP type (CG, GMRES, etc) and the preconditioner type (ILU, ICC etc). Depends on incompressible or not, and other factors.
///
- Todo:
- #2057 Make better choices here...
- Parameters:
-
solver KSP solver object (Petsc object)
- Todo:
- #2057 Make better choices..
Definition at line 1437 of file AbstractNonlinearElasticitySolver.hpp.
References PetscTools::IsSequential().
| virtual void AbstractNonlinearElasticitySolver< DIM >::SetupChangeOfBasisMatrix | ( | unsigned | elementIndex, |
| unsigned | currentQuadPointGlobalIndex | ||
| ) | [inline, protected, virtual] |
Should re-set the variable mChangeOfBasisMatrix if this is not to be the identity. Here, does nothing, but over-ridden in cardiac mechanics solvers.
- Parameters:
-
elementIndex element global index currentQuadPointGlobalIndex global index of the quad point
Definition at line 338 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::SetWriteOutputEachNewtonIteration | ( | bool | writeOutputEachNewtonIteration = true | ) | [inline] |
By default only the original and converged solutions are written. Call this by get node positions written after every Newton step (mostly for debugging).
- Parameters:
-
writeOutputEachNewtonIteration whether to write each iteration
Definition at line 574 of file AbstractNonlinearElasticitySolver.hpp.
References AbstractNonlinearElasticitySolver< DIM >::mWriteOutputEachNewtonIteration.
| bool AbstractNonlinearElasticitySolver< DIM >::ShouldAssembleMatrixTermForPressureOnDeformedBc | ( | ) | [protected] |
When pressure-on-deformed-body boundary conditions are used:
For some reason the use of the jacobian corresponding to the pressure term doesn't help (makes things worse!) if the current guess is not close enough to the solution, and can lead to immediate divergence. It will lead to faster convergence once close enough to the solution. This method contains the logic used to decide whether to include the jacobian for this term or not.
We only assemble the contribution to the matrix if the last damping value is close enough to 1 (non-snes solver). This will current always return false if the snes solver is being used
Definition at line 1101 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::Solve | ( | double | tol = -1.0 | ) |
Solve the problem.
- Parameters:
-
tol tolerance used in Newton solve (defaults to -1.0). Not used in SNES solves.
Definition at line 1390 of file AbstractNonlinearElasticitySolver.hpp.
| void AbstractNonlinearElasticitySolver< DIM >::SolveNonSnes | ( | double | tol = -1.0 | ) | [protected] |
Solve method which uses a nonlinear solver coded in this class (as opposed to the SNES solver. Private, user should call Solve()
- Parameters:
-
tol absolute solver used in nonlinear solve
Definition at line 1838 of file AbstractNonlinearElasticitySolver.hpp.
References EXCEPTION.
| void AbstractNonlinearElasticitySolver< DIM >::SolveSnes | ( | ) | [private] |
Alternative solve method which uses a Petsc SNES solver. Private, user should call Solve()
Definition at line 1937 of file AbstractNonlinearElasticitySolver.hpp.
References PetscTools::Destroy(), EXCEPTION, PetscVecTools::Finalise(), and PETSC_DESTROY_PARAM.
| double AbstractNonlinearElasticitySolver< DIM >::TakeNewtonStep | ( | ) | [protected] |
Take one newton step, by solving the linear system -Ju=f, (J the jacobian, f the residual, u the update), and picking s such that a_new = a_old + su (a the current solution) such |f(a)| is the smallest.
- Returns:
- The current norm of the residual after the newton step.
Definition at line 1553 of file AbstractNonlinearElasticitySolver.hpp.
References GenericEventHandler< 7, MechanicsEventHandler >::BeginEvent(), PetscTools::Destroy(), GenericEventHandler< 7, MechanicsEventHandler >::EndEvent(), EXCEPTION, PetscTools::GetMyRank(), PETSC_DESTROY_PARAM, Timer::PrintAndReset(), and Timer::Reset().
| double AbstractNonlinearElasticitySolver< DIM >::UpdateSolutionUsingLineSearch | ( | Vec | solution | ) | [protected] |
Using the update vector (of Newton's method), choose s such that ||f(x+su)|| is most decreased, where f is the residual vector, x the current solution (mCurrentSolution) and u the update vector. This checks s=1 first (most likely to be the current solution, then 0.9, 0.8.. until ||f|| starts increasing.
- Parameters:
-
solution The solution of the linear solve in newton's method, ie the update vector u.
Definition at line 1736 of file AbstractNonlinearElasticitySolver.hpp.
References EXCEPTION.
| void AbstractNonlinearElasticitySolver< DIM >::VectorSum | ( | std::vector< double > & | rX, |
| ReplicatableVector & | rY, | ||
| double | a, | ||
| std::vector< double > & | rZ | ||
| ) | [protected] |
Simple helper function, computes Z = X + aY, where X and Z are std::vectors and Y a ReplicatableVector.
- Parameters:
-
rX X rY Y (replicatable vector) a a rZ Z the returned vector
Definition at line 1538 of file AbstractNonlinearElasticitySolver.hpp.
References ReplicatableVector::GetSize().
| void AbstractNonlinearElasticitySolver< DIM >::WriteCurrentAverageElementStresses | ( | std::string | fileName, |
| int | counterToAppend = -1 |
||
| ) |
If SetComputeAverageStressPerElementDuringSolve() was called before the Solve(), then this method can be used to print the average stresses to file)
Each line of the output file corresponds to one element: the DIM*DIM matrix will be written as one line, using the ordering: T00 T01 T02 T10 T11 T12 T20 T21 T22.
- Parameters:
-
fileName The file name stem counterToAppend (Optional) number to append in the filename.
The final file is [fileName]_[counterToAppend].stress
Definition at line 797 of file AbstractNonlinearElasticitySolver.hpp.
References EXCEPTION.
| void AbstractNonlinearElasticitySolver< DIM >::WriteCurrentDeformationGradients | ( | std::string | fileName, |
| int | counterToAppend = -1 |
||
| ) |
Write the deformation gradients for each element (evaluated at the centroids of each element) Each line of the output file corresponds to one element: the DIM*DIM matrix will be written as one line, using the ordering: F00 F01 F02 F10 F11 F12 F20 F21 F22.
- Parameters:
-
fileName The file name stem counterToAppend (Optional) number to append in the filename.
The final file is [fileName]_[counterToAppend].strain
Definition at line 759 of file AbstractNonlinearElasticitySolver.hpp.
References AbstractTetrahedralMesh< ELEMENT_DIM, SPACE_DIM >::GetElementIteratorBegin().
Member Data Documentation
const size_t AbstractNonlinearElasticitySolver< DIM >::BOUNDARY_STENCIL_SIZE = DIM*NUM_NODES_PER_BOUNDARY_ELEMENT [static, protected] |
Boundary stencil size. Note this is just the number of spatial unknowns on the boundary element, because the boundary integral terms (in either compressible or incompressible formulations) (i) do not involve pressure and (ii) do not appear in the pressure equations (the constraint equations).
Reimplemented in CompressibleNonlinearElasticitySolver< DIM >, and IncompressibleNonlinearElasticitySolver< DIM >.
Definition at line 132 of file AbstractNonlinearElasticitySolver.hpp.
FourthOrderTensor<DIM,DIM,DIM,DIM> AbstractNonlinearElasticitySolver< DIM >::dTdE [protected] |
Storage space for a 4th order tensor used in assembling the Jacobian (to avoid repeated memory allocation).
Definition at line 186 of file AbstractNonlinearElasticitySolver.hpp.
std::vector<c_vector<double,DIM*(DIM+1)/2> > AbstractNonlinearElasticitySolver< DIM >::mAverageStressesPerElement [protected] |
If the stresses for each element (averaged over quadrature point stresses) are to be stored, they are stored in this variable. Note to save memory we just don't store the lower half of the stress, as the stress is symmetric, hence this is a vector of 6 (in 3d) variables rather than a 3d matrix.
Definition at line 240 of file AbstractNonlinearElasticitySolver.hpp.
double AbstractNonlinearElasticitySolver< DIM >::MAX_NEWTON_ABS_TOL = 1e-7 [static, protected] |
Maximum absolute tolerance for Newton solve. The Newton solver uses the absolute tolerance corresponding to the specified relative tolerance, but has a max and min allowable absolute tolerance. (ie: if max_abs = 1e-7, min_abs = 1e-10, rel=1e-4: then if the norm of the initial_residual (=a) is 1e-2, it will solve with tolerance 1e-7; if a=1e-5, it will solve with tolerance 1e-9; a=1e-9, it will solve with tolerance 1e-10.
Definition at line 141 of file AbstractNonlinearElasticitySolver.hpp.
c_matrix<double,DIM,DIM> AbstractNonlinearElasticitySolver< DIM >::mChangeOfBasisMatrix [protected] |
Matrix to be passed to material law, in case the material law is anisotropic and depends on a local coordinate system (eg cardiac problems). Defaults to the identity matrix. The cardiac mechanics solvers override SetupChangeOfBasisMatrix() which re-sets this for every element and quad point.
Definition at line 167 of file AbstractNonlinearElasticitySolver.hpp.
Referenced by AbstractNonlinearElasticitySolver< DIM >::AbstractNonlinearElasticitySolver().
bool AbstractNonlinearElasticitySolver< DIM >::mCheckedOutwardNormals [protected] |
Whether the boundary elements of the mesh have been checked for whether the ordering if such that the normals are outward-facing
Definition at line 202 of file AbstractNonlinearElasticitySolver.hpp.
double AbstractNonlinearElasticitySolver< DIM >::mCurrentTime [protected] |
This solver is for static problems, however the body force or surface tractions could be a function of time. The user should call SetCurrentTime() if this is the case.
Definition at line 196 of file AbstractNonlinearElasticitySolver.hpp.
Referenced by AbstractNonlinearElasticitySolver< DIM >::SetCurrentTime().
double AbstractNonlinearElasticitySolver< DIM >::MIN_NEWTON_ABS_TOL = 1e-10 [static, protected] |
Minimum absolute tolerance for Newton solve. See documentation for MAX_NEWTON_ABS_TOL.
Definition at line 144 of file AbstractNonlinearElasticitySolver.hpp.
bool AbstractNonlinearElasticitySolver< DIM >::mIncludeActiveTension [protected] |
Whether to call AddActiveStressAndStressDerivative() when computing stresses or not.
Subclasses, such as the cardiac mechanics solvers, may implement the above method to add active contributions to the stress. However, sometimes we might want to switch this off. Defaults to true.
Definition at line 225 of file AbstractNonlinearElasticitySolver.hpp.
Referenced by AbstractNonlinearElasticitySolver< DIM >::SetIncludeActiveTension().
double AbstractNonlinearElasticitySolver< DIM >::mKspAbsoluteTol [protected] |
Absolute tolerance for linear systems. Can be set by calling SetKspAbsoluteTolerances(), but default to -1, in which case a relative tolerance is used.
Definition at line 174 of file AbstractNonlinearElasticitySolver.hpp.
Referenced by AbstractNonlinearElasticitySolver< DIM >::SetKspAbsoluteTolerance().
double AbstractNonlinearElasticitySolver< DIM >::mLastDampingValue [protected] |
The last damping value used in the current nonlinear (non-snes) solve. If near 1.0, this indicates that the current guess is near the solution. Initialised to 0.0 at the beginning of each nonlinear solve.
Definition at line 215 of file AbstractNonlinearElasticitySolver.hpp.
unsigned AbstractNonlinearElasticitySolver< DIM >::mNumNewtonIterations [protected] |
Number of Newton iterations taken in last solve.
Definition at line 189 of file AbstractNonlinearElasticitySolver.hpp.
Mat& AbstractNonlinearElasticitySolver< DIM >::mrJacobianMatrix [protected] |
Reference to the matrix 'mLhsSystemMatrix' in the parent class, named as the jacobian, just to make code clearer.
Definition at line 159 of file AbstractNonlinearElasticitySolver.hpp.
SolidMechanicsProblemDefinition<DIM>& AbstractNonlinearElasticitySolver< DIM >::mrProblemDefinition [protected] |
This class contains all the information about the problem (except the material law): body force, surface tractions, fixed nodes, density
Reimplemented from AbstractContinuumMechanicsSolver< DIM >.
Definition at line 153 of file AbstractNonlinearElasticitySolver.hpp.
Referenced by AbstractNonlinearElasticitySolver< DIM >::AbstractNonlinearElasticitySolver().
bool AbstractNonlinearElasticitySolver< DIM >::mSetComputeAverageStressPerElement [protected] |
The user may request that the stress for each element (averaged over quadrature point stresses) are saved during the Solve; this bool states this (defaults to false).
Definition at line 231 of file AbstractNonlinearElasticitySolver.hpp.
bool AbstractNonlinearElasticitySolver< DIM >::mUseSnesSolver [protected] |
If SetUsingSnesSolver() is called on the problem definition class, or the command line argument "-mech_use_snes" is given the Petsc SNES solver (nonlinear solver) will be used.
Definition at line 208 of file AbstractNonlinearElasticitySolver.hpp.
Referenced by AbstractNonlinearElasticitySolver< DIM >::AbstractNonlinearElasticitySolver().
bool AbstractNonlinearElasticitySolver< DIM >::mWriteOutputEachNewtonIteration [protected] |
By default only the initial and final solutions are written. However, we may want to write the solutions after every Newton iteration, in which case the following should be set to true.
Definition at line 181 of file AbstractNonlinearElasticitySolver.hpp.
Referenced by AbstractNonlinearElasticitySolver< DIM >::SetWriteOutputEachNewtonIteration().
double AbstractNonlinearElasticitySolver< DIM >::NEWTON_REL_TOL = 1e-4 [static, protected] |
Relative tolerance for Newton solve. See documentation for MAX_NEWTON_ABS_TOL.
Definition at line 147 of file AbstractNonlinearElasticitySolver.hpp.
const size_t AbstractNonlinearElasticitySolver< DIM >::NUM_NODES_PER_BOUNDARY_ELEMENT = DIM*(DIM+1)/2 [static, protected] |
Number of nodes per boundary element.
Reimplemented in CompressibleNonlinearElasticitySolver< DIM >, and IncompressibleNonlinearElasticitySolver< DIM >.
Definition at line 126 of file AbstractNonlinearElasticitySolver.hpp.
const size_t AbstractNonlinearElasticitySolver< DIM >::NUM_NODES_PER_ELEMENT = (DIM+1)*(DIM+2)/2 [static, protected] |
Number of nodes per element.
Reimplemented in CompressibleNonlinearElasticitySolver< DIM >, and IncompressibleNonlinearElasticitySolver< DIM >.
Definition at line 123 of file AbstractNonlinearElasticitySolver.hpp.
const size_t AbstractNonlinearElasticitySolver< DIM >::NUM_VERTICES_PER_ELEMENT = DIM+1 [static, protected] |
Number of vertices per element.
Reimplemented in CompressibleNonlinearElasticitySolver< DIM >, and IncompressibleNonlinearElasticitySolver< DIM >.
Definition at line 120 of file AbstractNonlinearElasticitySolver.hpp.
The documentation for this class was generated from the following file:
- continuum_mechanics/src/solver/AbstractNonlinearElasticitySolver.hpp
